






Всем доброго дня 🤝 Недавно в группе был вопрос по поводу I2C, в результате я сделал простенький тестовый проект, после чего меня посетила мысль, что надо бы его выложить на сайте. Разумеется в течение пары часов я занялся абсолютно другими проектами и об этом благополучно забыл. Но! Сегодня похожая тема всплыла и на форуме, так что по-быстрому осуществлю публикацию задуманного.
Итак, идея проста - один модуль I2C настраивается на работу в качестве master'а, второй же выступает в роли slave'а. Оба периферийных модуля осуществляют двунаправленный обмен друг с другом, который отслеживается в соответствующих callback'ах. В общем-то, для проверки работоспособности callback-функций изначально все и делалось. Проект для CubeIde будет в конце, пройдемся кратко по основным этапам...
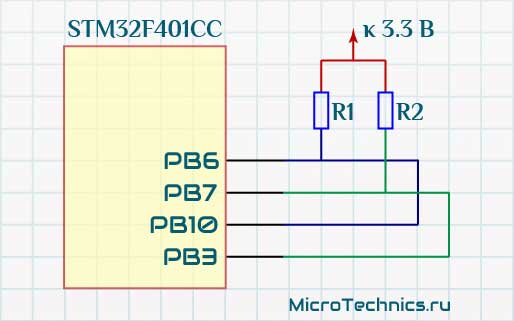
С физическим подключением здесь все просто, использую I2C1 и I2C2, поэтому замыкаются:
- I2C1_SCL (PB6) ↔ I2C2_SCL (PB10)
- I2C1_SDA (PB7) ↔ I2C2_SDA (PB3)
Обязательно обе линии подтягиваются к питанию, я поставил 4.7 КОм, итоговый результат:
И да, махинации производились на первой попавшейся плате, что не удивительно, ей оказалась Black Pill с контроллером STM32F401CC. Поэтому он же и выбран в CubeMx:
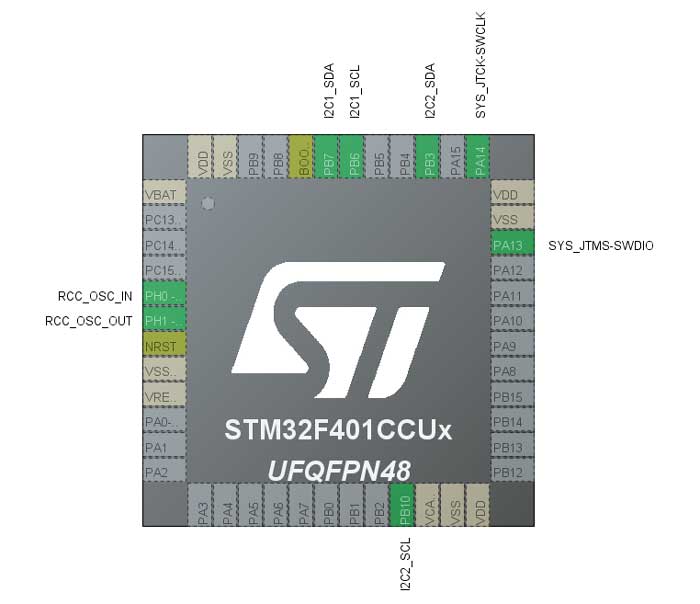
Из сконфигурированного в наличии имеем:
- I2C1
- I2C2
- HSE, так как используется внешний кварц
- SWD для прошивочно-отладочных процессов
- на этом все
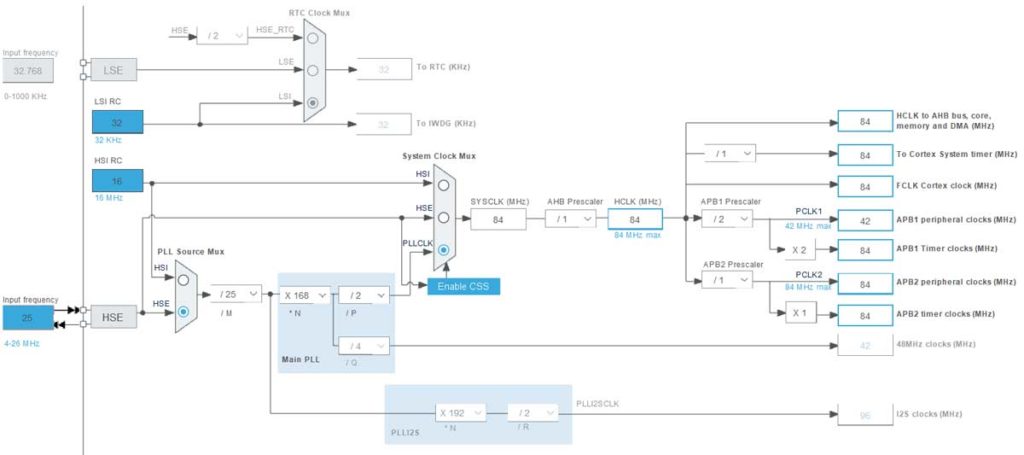
Схема тактирования:
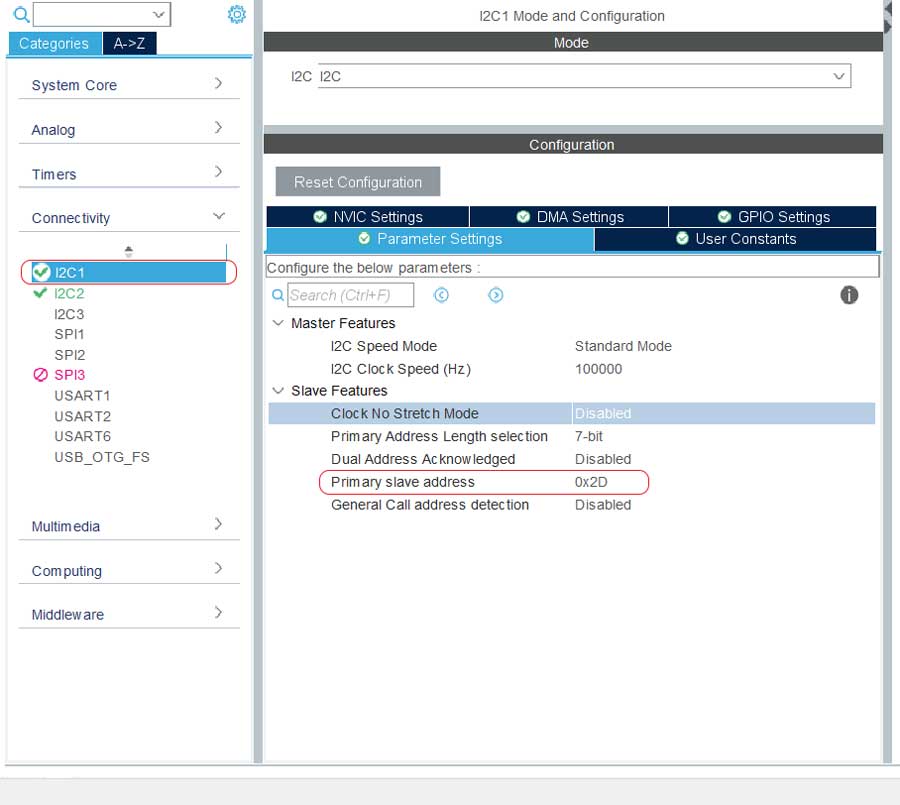
Настройки I2C оставляем дефолтными, за исключением одной опции. I2C1 будет slave'ом, поэтому для него задаем адрес, я выбрал 0x2D без веской на то причины, первое, что пришло в голову:
И для обоих модулей включаем прерывания:

Сохраняем изменения, что приводит к генерации кода, который и начинаем редактировать. Дефайним использованный адрес:
define I2C_SLAVE_ADDRESS 0x2D
Далее следует ряд демо-переменных для теста (полный код в конце статьи), а также указатели на модули I2C:
I2C_HandleTypeDef* i2cMasterHandler = &hi2c2; I2C_HandleTypeDef* i2cSlaveHandler = &hi2c1;
В while(1) последовательно выполняются следующие действия:
- slave встает на прием
- master отправляет байт данных
- ждем, пока slave примет данные, флаг
slaveWaitDataобслуживается в callback'е - далее производим аналогичные операции, но в диаметрально противоположном направлении - master встает на прием
- slave отправляет байт
- ожидаем, когда данные поступят на I2C2, который тут в роли ведущего
Между делом инкрементируем счетчики принятых/отправленных данных, а также непосредственно передаваемый туда-обратно байт, по итогу имеем код:
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
slaveWaitData = 1;
HAL_I2C_Slave_Receive_IT(i2cSlaveHandler, &slaveRxData, 1);
HAL_I2C_Master_Transmit_IT(i2cMasterHandler, (I2C_SLAVE_ADDRESS << 1), &masterTxData, 1);
while(slaveWaitData);
slaveTxData = slaveRxData + 1;
masterWaitData = 1;
HAL_I2C_Master_Receive_IT(i2cMasterHandler, (I2C_SLAVE_ADDRESS << 1), &masterRxData, 1);
HAL_I2C_Slave_Transmit_IT(i2cSlaveHandler, &slaveTxData, 1);
while(masterWaitData);
masterTxData = masterRxData + 1;
// Just for debugging convenience
HAL_Delay(500);
}
Обратите внимание на известную фишку HAL и STM32, когда адрес (I2C_SLAVE_ADDRESS) нужно руками сдвинуть на один бит влево при передаче в функции I2C. Осталось добавить код callback-функций, который также несложен:
/* USER CODE BEGIN 4 */
void HAL_I2C_MasterRxCpltCallback(I2C_HandleTypeDef *hi2c)
{
if (hi2c == i2cMasterHandler)
{
masterWaitData = 0;
masterRxCounter++;
}
}
void HAL_I2C_MasterTxCpltCallback(I2C_HandleTypeDef *hi2c)
{
if (hi2c == i2cMasterHandler)
{
masterTxCounter++;
}
}
void HAL_I2C_SlaveRxCpltCallback(I2C_HandleTypeDef *hi2c)
{
if (hi2c == i2cSlaveHandler)
{
slaveWaitData = 0;
slaveRxCounter++;
}
}
void HAL_I2C_SlaveTxCpltCallback(I2C_HandleTypeDef *hi2c)
{
if (hi2c == i2cSlaveHandler)
{
slaveTxCounter++;
}
}
/* USER CODE END 4 */
Здесь особо нечего и комментировать, в случае чего, пишите в комментарии. Собираем проект, прошиваем контроллер и запускаем под отладчиком:
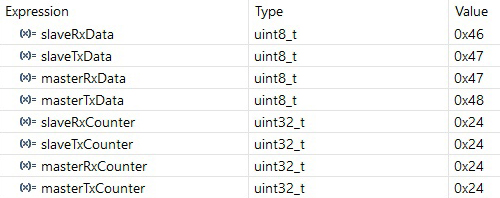
Счетчики тикают, данные инкрементируются, процессы протекают стабильно и успешно 👍 В общем, такой вот небольшой тестовый проект, банально для проверки коммуникации и работоспособности, уже дважды пригодился за короткий срок, так что теперь он живет на сайте.
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define I2C_SLAVE_ADDRESS 0x2D
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
I2C_HandleTypeDef hi2c1;
I2C_HandleTypeDef hi2c2;
/* USER CODE BEGIN PV */
uint8_t masterTxData = 0x00;
uint8_t masterRxData = 0x00;
uint8_t slaveTxData = 0x00;
uint8_t slaveRxData = 0x00;
uint8_t slaveWaitData = 0;
uint8_t masterWaitData = 0;
uint32_t masterTxCounter = 0;
uint32_t masterRxCounter = 0;
uint32_t slaveTxCounter = 0;
uint32_t slaveRxCounter = 0;
I2C_HandleTypeDef* i2cMasterHandler = &hi2c2;
I2C_HandleTypeDef* i2cSlaveHandler = &hi2c1;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_I2C1_Init(void);
static void MX_I2C2_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_I2C1_Init();
MX_I2C2_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
slaveWaitData = 1;
HAL_I2C_Slave_Receive_IT(i2cSlaveHandler, &slaveRxData, 1);
HAL_I2C_Master_Transmit_IT(i2cMasterHandler, (I2C_SLAVE_ADDRESS << 1), &masterTxData, 1);
while(slaveWaitData);
slaveTxData = slaveRxData + 1;
masterWaitData = 1;
HAL_I2C_Master_Receive_IT(i2cMasterHandler, (I2C_SLAVE_ADDRESS << 1), &masterRxData, 1);
HAL_I2C_Slave_Transmit_IT(i2cSlaveHandler, &slaveTxData, 1);
while(masterWaitData);
masterTxData = masterRxData + 1;
// Just for debugging convenience
HAL_Delay(500);
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE2);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 25;
RCC_OscInitStruct.PLL.PLLN = 168;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief I2C1 Initialization Function
* @param None
* @retval None
*/
static void MX_I2C1_Init(void)
{
/* USER CODE BEGIN I2C1_Init 0 */
/* USER CODE END I2C1_Init 0 */
/* USER CODE BEGIN I2C1_Init 1 */
/* USER CODE END I2C1_Init 1 */
hi2c1.Instance = I2C1;
hi2c1.Init.ClockSpeed = 100000;
hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;
hi2c1.Init.OwnAddress1 = 90;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN I2C1_Init 2 */
/* USER CODE END I2C1_Init 2 */
}
/**
* @brief I2C2 Initialization Function
* @param None
* @retval None
*/
static void MX_I2C2_Init(void)
{
/* USER CODE BEGIN I2C2_Init 0 */
/* USER CODE END I2C2_Init 0 */
/* USER CODE BEGIN I2C2_Init 1 */
/* USER CODE END I2C2_Init 1 */
hi2c2.Instance = I2C2;
hi2c2.Init.ClockSpeed = 100000;
hi2c2.Init.DutyCycle = I2C_DUTYCYCLE_2;
hi2c2.Init.OwnAddress1 = 0;
hi2c2.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c2.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c2.Init.OwnAddress2 = 0;
hi2c2.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c2.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN I2C2_Init 2 */
/* USER CODE END I2C2_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
}
/* USER CODE BEGIN 4 */
void HAL_I2C_MasterRxCpltCallback(I2C_HandleTypeDef *hi2c)
{
if (hi2c == i2cMasterHandler)
{
masterWaitData = 0;
masterRxCounter++;
}
}
void HAL_I2C_MasterTxCpltCallback(I2C_HandleTypeDef *hi2c)
{
if (hi2c == i2cMasterHandler)
{
masterTxCounter++;
}
}
void HAL_I2C_SlaveRxCpltCallback(I2C_HandleTypeDef *hi2c)
{
if (hi2c == i2cSlaveHandler)
{
slaveWaitData = 0;
slaveRxCounter++;
}
}
void HAL_I2C_SlaveTxCpltCallback(I2C_HandleTypeDef *hi2c)
{
if (hi2c == i2cSlaveHandler)
{
slaveTxCounter++;
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
Ссылка на проект - MT_I2C_Testing.




Привет. Имеется две платы: bluepill и dev board на чипе stm32f030f4p6. Хотел соединить их по i2c. Начал с вашего примера, используя bluepill. Потом решил проверить в блокирующем режиме. Все работает. Но когда стал пробовать запустить stm32f030 в режиме slave, ничего не вышло. Его просто не видно как slave устройство. Подтягивающие резисторы на 4.7k стоят. Можете подсказать в каком направлении смотреть?
Привет. То есть на BluePill работает в любых вариантах, а проблемы начинаются именно с stm32f030?
Да.
Можешь проект для f030 скинуть?
Вообщем после замены чипа и пересоздания проекта заново, в режиме с прерываниями все заработало. В режиме блокировки так и не работает. Кстати, не могли бы вы подсказать, как так получается, что адреса 0x2d, 0x2e, 0x2f работают, а после не работают до 0x37?
И до 0x2d тоже работают, тоесть выпадает этот участок.
Логическим анализатором надо посмотреть, что в шине реально присутствует.
ДЕЛАЮ точную копию вашего точно такая же микросхема нечего не получается и вопрос почему у вас после WHILE СТОИТ ; .
Доброго времени суток, потому что тело цикла пустое.
Подтягивающие резисторы добавили?
Добрый день , да все стоит , странно конечно что он останавливается на этом цикле и зависает в отладке , пробывал разные вариации подключения ((
Видимо в колбэк не попадает, можно проверить, срабатывает ли вообще прерывание хоть на каком-то этапе.
И, если не срочно, то я в принципе через пару дней могу проверить у себя.
Ну как в итоге, получилось или еще актуально?
Да актуально
Можете проект на почту скинуть, я у себя проверю?
Здравствуйте, была похожая проблема, у меня это решилось в настройках GPIO для I2C. Нужно было каждый пин на pull-up перевести.