





Вступление.
В завершение изучения таймеров, в частности таймеров общего назначения, рассмотрим оставшийся без внимания блок - Trigger controller:
Таймер в режиме ведомого.
Таймеры также могут работать в режиме ведомого с реакцией на внешнее событие, задаваемой битами SMS регистра TIMx_SMCR:
- 100 (Reset Mode): режим сброса, выбранный триггер сбрасывает счетчик;
- 101 (Gated Mode): режима шлюза, счетчик включен только при высоком уровне сигнала триггера. При переходе его в низкий уровень счет останавливается, но счетчик не сбрасывается. При переходе триггерного сигнала обратно в высокий уровень счет возобновляется;
- 110 (Trigger Mode): режим триггера, счет запускается по восходящему фронту триггерного сигнала (счетчик не сбрасывается, при переходе триггерного сигнала в низкий уровнеь ничего не происходит);
- 111 (External Clock Mode 1): режим внешнего тактирования, триггерный сигнал управляет изменением счетчика.
Источником триггерного сигнала могут служить:
- выходы TRGO других таймеров (мастер-таймеров), конкретные списки можно найти в Reference Manual;
- внешняя линия ETR;
- сигнал детектора фронта первого канала таймера;
- сигналы 1 и 2 каналов таймера после фильтрации (TI1FP1 и TI2FP2).
Источник триггерного сигнала задается битами TS регистра TIMx_SMCR:
- 000*: источником триггерного сигнала является внутренний триггер ITR0;
- 001*: источником триггерного сигнала является внутренний триггер ITR1;
- 010*: источником триггерного сигнала является внутренний триггер ITR2;
- 011*: источником триггерного сигнала является внутренний триггер ITR3;
- 100*: источником триггерного сигнала является детектор фронта первого канала TI1F_ED;
- 101*: источником триггерного сигнала является фильтрованный сигнал первого канала TI1FP1;
- 110*: источником триггерного сигнала является фильтрованный сигнал второго канала TI2FP2;
- 111*: источником триггерного сигнала является внешний сигнал ETRF.
Библиотека Zhele и ведомый режим таймера.
Для тонкой настройки поведения таймера по внешнему событию класс таймера содержит вложенный класс SlaveMode, предоставляющий следующий интерфейс:
- void EnableSlaveMode(Mode mode): активирует режим ведомого,
Modeявляется перечислением со следующими возможными значениями:- SlaveModeDisabled - режим ведомого отключен;
- EncoderMode1 - режим энкодера 1;
- EncoderMode2 - режим энкодера 2;
- EncoderMode3 - режим энкодера 3;
- ResetMode - режим сброса счетчика;
- GatedMode - режим шлюза;
- TriggerMode - режим триггера;
- ExternalClockMode - режим внешнего тактирования.
- void DisableSlaveMode(): отключает режим ведомого (равносильно вызову предыдущего метода с аргументом
SlaveModeDisabled; - void SelectTrigger(Trigger trigger): позволяет выбрать источник триггерного сигнала,
Triggerявляется перечислением со следующими возможными значениями:- InternalTrigger0 - триггером является сигнал ITR0;
- InternalTrigger1 - триггером является сигнал ITR1;
- InternalTrigger2 - триггером является сигнал ITR2;
- InternalTrigger3 - триггером является сигнал ITR3;
- Ti1EdgeDetector - триггером является детектор фронта первого канала TI1F_ED;
- FilteredTimerInput1 - триггером является сигнал TI1FP1;
- FilteredTimerInput2 - триггером является сигнал TI2FP2;
- FilteredTimerInput1 - триггером является внешний сигнал ETRF.
- void SetTriggerPrescaler(ExternalTriggerPrescaler prescaler): устанавливает предделитель триггерного сигнала,
ExternalTriggerPrescalerявляется перечислением со значениями, соответствующими значениям битов ETF регистра TIMx_SMCR, их описание можно найти в Reference Manual (слишком объемно, чтобы вставлять в статью).
Таймер в режиме ведущего.
Входные линии ITR0 ... ITR3 являются выходными для соответствующих мастер-таймеров. Работа таймера в режиме ведущего задается битами MMS регистра TIMx_CR2:
- 000 (Reset): бит UG регистра TIMx_EGR используется как выход TRGO;
- 001 (Enable): включение таймера (бит CNT_EN) используется как выход TRGO;
- 010 (Update): событие обновления (переполнения) счетчика используется как выход TRGO, такой режим позволяет строить каскады из таймеров для подсчета больших промежутков;
- 011 (Compare Pulse): флаг CC1IF используется как выход TRGO;
- 100 (Compare 1): сигнал OC1REF (сравнение первого канала) используется как выход TRGO;
- 101 (Compare 2): сигнал OC2REF (сравнение второго канала) используется как выход TRGO;
- 110 (Compare 3): сигнал OC3REF (сравнение третьего канала) используется как выход TRGO;
- 111 (Compare 4): сигнал OC4REF (сравнение четвертого канала) используется как выход TRGO;
Библиотека Zhele и ведущий режим таймера.
Поддержка режима ведущего таймера реализована в виде метода шаблона класса базового таймера void SetMasterMode(MasterMode mode), MasterMode является перечислением со следующими возможными значениями:
- Reset: сброс таймера используется как TRGO;
- Enable: включение счетчика таймера используется как TRGO;
- Update: обновление таймера используется как TRGO;
- ComparePulse: CC1F используется как TRGO;
- CompareCh1: OC1REF таймера используется как TRGO;
- CompareCh2: OC2REF таймера используется как TRGO;
- CompareCh3: OC3REF таймера используется как TRGO;
- CompareCh4: OC4REF таймера используется как TRGO;
Пример.
Не так давно передо мной стояла задача реализовать код для некоторого датчика, подразумевающего следующий порядок работы:
- На излучатель подается ШИМ-сигнал частотой 1 Мгц.
- С приемного датчика снимается сигнал и измеряется отставание импульсов от излучателя.
Для реализации такой логики хорошо подходит связка двух таймеров:
- Первый таймер выдает ШИМ-сигнал, его триггерный выход TRGO настроен в режим обновления.
- Второй таймер работает в режиме захвата, являясь при этом ведомым по отношению к первому таймеру со сбросом по триггерному сигналу.
Таким образом, на начало каждого импульса ШИМ-сигнала счетчик второго таймера сбрасывается, и, заведомо зная параметры ШИМ, можно измерить отставание сигнала с приемника.
Примерный код, реализующий предложенное решение:
// Настройка ШИМ, МК работает на частоте 80 Мгц
void Sensor::ConfigureOutputPwm()
{
// Включение таймера
OutputTimer::Enable();
// Предделитель = 4
OutputTimer::SetPrescaler(3); // 80 Mhz / 4 = 20 Mhz
// Период = 20
OutputTimer::SetPeriod(19); // 20 Mhz / 20 = 1 MHz частота PWM. Период = 1 us.
// Выход TRGO на событие обновления
OutputTimer::SetMasterMode(OutputTimer::MasterMode::Update);
// Настройка таймера в режим ШИМ
OutputPwmChannel::SelectPins<OutputPwmPin>();
OutputPwmChannel::Enable();
OutputPwmChannel::SetOutputMode(OutputPwmChannel::OutputMode::PWM1);
OutputPwmChannel::SetPulse(10); // 50% скважность.
}
// Настройка таймера для захвата
void Sensor::ConfigureInputTimer()
{
// Включение таймера
InputTimer::Enable();
// Без дополнительного деления, для максимальной точности
InputTimer::SetPrescaler(0); // 80 Mhz / 1 = 80 Mhz. 1 tick = 1/80 us
InputTimer::SetPeriod(0xffff);
// Настройка ведомого режима: сброс по внутреннему сигналу ITR1
InputTimer::SlaveMode::SelectTrigger(InputTimer::SlaveMode::Trigger::InternalTrigger1);
InputTimer::SlaveMode::EnableSlaveMode(InputTimer::SlaveMode::Mode::ResetMode);
// Настройка режима захвата
InputCaptureChannel::SelectPins<InputCapturePin>();
InputCaptureChannel::SetCapturePolarity(InputCaptureChannel::CapturePolarity::RisingEdge);
InputCaptureChannel::SetCaptureMode(InputCaptureChannel::CaptureMode::Direct);
InputCaptureChannel::EnableInterrupt();
InputCaptureChannel::Enable();
}
Таймер в режиме энкодера.
Подробно про инкрементальный энкодер можно почитать в интернете, нам же достаточно следующих двух фактов:
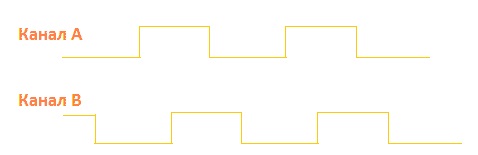
- Энкодер имеет два выхода (A и B).
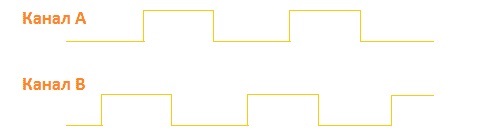
- В зависимости от направления вращения импульс на выходе A на 90 градусов отстает от импульса на выходе B или опережает его.
Проще всего пояснить написанное выше картинками (взято отсюда):
И в другом направении:
Настройка таймера в режиме энкодера.
На уроке 6 уже были приведены три режима, связанных с обработкой сигнала энкодера, которые задаются битами SMS регистра TIMx_SMCR:
- 001 (Encoder mode 1): режиме энкодера 1, счетчик изменяется по фронту TI2FP1 на единицу вверх/вниз в зависимости от состояния TI1FP2;
- 010 (Encoder mode 2): режиме энкодера 2, счетчик изменяется по фронту TI1FP2 на единицу вверх/вниз в зависимости от состояния TI2FP1;
- 011 (Encoder mode 3): режиме энкодера 3, счетчик изменяется по обоим фронтам (то есть изменяется на два вверх/вниз в зависимости от направления).
Библиотека Zhele для работы с энкодером.
Для использования таймера в режиме энкодера достаточно выполнить несколько действий:
- Включить тактирование таймера (TimerX::Enable*();).
- Установить периодом таймера (значением регистра перезагрузки) максимальное значение счетчика. Можно обойтись без этого, но в таком случае придется вручную обрабатывать переполнение в обе стороны. Код настройки: TimerX::SetPeriod(MAX_VALUE + 1);.
- Активировать режим ведомого с подходящим вариантом (например, режим 2): TimerX::SlaveMode::EnableSlaveMode(TimerX::SlaveMode::Mode::EncoderMode2).
- Включить два канала таймера в прямом (direct) режиме: TimerX::InputCapture<0>::Enable(); TimerX::InputCapture<0>::SetCaptureMode(); TimerX::InputCapture<0>::SetCaptureMode(TimerX::InputCapture<0>::CaptureMode::Direct);.
- Включить счетчик таймера: TimerX::Start();.
Текущее значение счетчика будет равно удвоенному значению измеряемого значения. Фреймворк содержит драйвер инкрементального энкодера, представленный в виде шаблона класса:
template < typename _Timer, typename _PinA = Zhele::TemplateUtils::GetType_t<0, typename _Timer::InputCapture<0>::Pins>, typename _PinB = Zhele::TemplateUtils::GetType_t<0, typename _Timer::InputCapture<1>::Pins>, uint16_t _MaxValue = 0xffff>
Описание шаблонных параметров:
- _Timer: таймер.
- _PinA: вход канала A (по умолчанию первый пин первого канала).
- _PinB: вход канала B (по умолчанию первый пин второго канала).
- _MaxValue: максимальное значение для счёта.
Интерфейс класса представлен следующими статическими методами:
- void Init() - инициализирует таймер и каналы.
- void EnableInterrupt() - включает прерывание.
- uint16_t GetValue() - возвращает текущее значение энкодера (сразу с делением на 2).
- uint16_t GetValueInterrupt() - возвращает текущее значение энкодера, версия для прерывания. Дело в том, что прерывание срабатывает по восходящему фронту, поэтому счетчик в этот момент отличается от предыдущего только на 1 вверх/вниз, вышел из положения введением отдельного метода.
Пример.
Ниже приведен простейший пример использования инкрементального энкодера с применением фреймворка Zhele:
#include <timer.h>
#include <drivers/encoder.h>
using Encoder = Zhele::Drivers::Encoder<Zhele::Timers::Timer2, Zhele::IO::Pa0, Zhele::IO::Pa1, 100>;
uint16_t Value;
int main()
{
Encoder::Init();
Encoder::EnableInterrupt();
for(;;)
{
// Encoder::GetValue(); - обычная версия
}
}
extern "C"
{
void TIM2_IRQHandler()
{
Value = Encoder::GetValueInterrupt();
Zhele::Timers::Timer2::ClearInterruptFlag();
}
}
В этот раз готового проекта нет, поскольку в уроке использовались части большого проекта, опубликовывать который по понятными, думаю, причинам, не хочется. На этом мы закончили рассмотрение таймеров в контроллерах Stm32 и их использование с применением фреймворка Zhele. Жду Ваших вопросов и предложений 🙂




Интересная библиотека, буду следить дальше за развитием!