





Вступление.
В предыдущем материале мы рассмотрели таймер общего назначения и использование каналов сравнения (скоро планирую подготовить материал с более объемными примерами), сегодня же к изучению предлагается второй компонент - каналы захвата.
Каналы завхвата.
Снова обратимся к диаграмме блока таймера общего назначения, где красным цветом выделены каналы захвата (до четырех для одного таймера) и разберем составные части схемы:
Линии TIMx_CH1 ... TIMx_CH4.
Линии TIMx_CH1 ... TIMx_CH4 являются входами каналов таймера, на которые, как правило, поступает внешний сигнал, параметры которого необходимо измерять.
Блок Input filter & edge detector.
Сигнал с входа попадает на модуль фильтрации и детектирования фронтов.
Режим захвата.
В базовом таймере единственным событием было переполнение счетчика, таймеры общего назначения позволяют реагировать (то есть генерировать событие) при достижении счетчиком заданного значения. Такой режим работы называется режимом сравнения. Как было сказано в предыдущем материале, каждый канал может работать (независимо от остальных) либо в режиме сравнения, либо в режиме захвата, в связи с чем оба этих режима для своего конфигурирования делят два регистра для настройки, биты которых, в зависимости от текущего режима, имеют разный смысл.
- TIMx_CCRy (где y - номер канала) - позволяет задать значение, при достижении счетчиком таймера которого происходит срабатывание канала сравнения;
- TIMx_CCMRy (где y = номер канала / 2, то есть 1 и 2 каналы делят регистр TIMx_CCMR1, а 3 и 4 - регистр TIMx_CCMR2).
Вход TIy проходит через модуль Input filter & edge detector, для каждого канала в регистре TIMx_CCER доступно два бита настройки:
- CCyE (Capture/Compare y output enable), если равен 0, канал неактивен, если равен 1, то выход зависит от уровня OCyREF;
- CCyP (Capture/Compare y output polarity), если равен 0, то выход является неинвертированным и событие захвата происходит по восходящему фронту сигнала. Если бит равен 1, то вход считается инвертированным и событие захвата происходит по нисходящему фронту сигнала
Рассмотрим возможные функции канала в режиме захвата, которые могут быть заданы полями CCyS, ICyPSC, ICyF соответствующего регистра (где y - номер канала).
Биты CCyS[1:0] предназначены для конфигурирования мультиплексора соответствующего канала и позволяют выбрать источник сигнала линии ICy, могут принимать следующие значения:
- 00 - канал настроен в режиме сравнения, смотри предыдущий урок;
- 01 - линия TIy является источником ICy;
- 10 - линия TIy +- 1 является источником ICy (то есть "соседний" вход: для IC1 - TI2, для IC2 - TI1, для IC3 - TI4, для IC4 - TI3);
- 11 - линия TRC является источником ICy (TRC - это выход мультиплексора триггерного сигнала, смотри предыдущий урок).
Биты ICyPSC[1:0] предназначены для настройки предделителя входного сигнала канала захвата и могут принимать следующие значения:
- 00 - нет деления (делитель равен 1), захват происходит на каждое событие обнаружение фронта входного сигнала;
- 01 - захват происходит на каждое второе событие обнаружение фронта входного сигнала (делитель равен 2);
- 10 - захват происходит на каждое четвертое событие обнаружение фронта входного сигнала (делитель равен 4);
- 11 - захват происходит на каждое восьмое событие обнаружение фронта входного сигнала (делитель равен 8).
Биты ICyF[3:0] предназначены для настройки цифрового фильтра сигнала канала захвата, подробное описание значений можно посмотреть в Reference Manual.
При наступлении события захвата (изменения состояния линии ICy) таймер помещает в регистр TIMx_CCRy текущее значение счетчика и позволяет сгенерировать прерывание (бит CCyE регистра TIMx_DIER) или запрос DMA (бит CCyD регистра TIMx_DIER).
Интерфейс библиотеки Zhele для таймеров общего назначения.
В библиотеке Zhele функционал модуля захвата таймера общего назначения реализован вложенным шаблонном класса GPTimer::InputCapture, являющимся производным от шаблона класса GPTimer::ChannelBase.
Этот раздел в точности совпадает с предыдущий уроком и продублирован для удобства чтения полного списка методов, доступных для модуля захвата.
Вложенный шаблон класса ChannelBase имеет следующие методы:
- void EnableInterrupt() - включает прерывание канала по событию захвата/сравнения;
- void DisableInterrupt() - отключает прерывание канала по событию захвата/сравнения;
- bool IsInterrupt() - показывает, установлен ли флаг прерывания канала;
- void ClearInterruptFlag() - сбрасывает флаг прерывания канала;
- void EnableDmaRequest() - включает запрос DMA по событию захвата/сравнения;
- void DisableDmaRequest() - отключает запрос DMA;
- void Enable() - включает канал;
- void Disable() - отключает канал.
GPTimer::InputCapture.
Вложенный шаблон класса InputCapture имеет следующие методы:
- void SetCapturePolarity(CapturePolarity polarity) - устанавливает полярность входного сигнала (по какому фронту происходит событие захвата), тип
CapturePolarityявляется перечислением со следующими значениями:- RisingEdge - захват по восходящему фронту;
- FallingEdge - захват по нисходящему фронту;
- BothEdges - захват по обоим фронтам (доступно не для всех таймеров/каналов, читайте RM!).
- void SetCaptureMode(CaptureMode mode) - устанавливает источник сигнала канала (мультиплексор для ICy), тип
CaptureModeявляется перечислением со следующими значениями:- Direct - прямой (источником ICy является TIy);
- Indirect - непрямой (источником ICy является соседний TIy);
- CaptureTrc - источником ICy является TRC.
- Base::Counter GetValue() - возвращает значение, записанное в регистр TIMx_CCRy;
- void SelectPins(int pinNumber) и его шаблонные вариации - выбор линии выхода.
Пример.
Наиболее очевидным применением модуля захвата является измерение длительности входного импульса (а также периода сигнала), поэтому в качестве демонстрации возможностей библиотеки Zhele предлагается реализовать соответствующую программу.
На самом деле данная задача может решаться несколькими способами, например:
- Подключение сигнала на вход двух каналов, один "ловит" начало импульса (захват по восходящему фронту), а второй наоборот - конец (нисходящий фронт). Длительность равна разнице регистров CCR.
- Почти то же самое, только сигнал подключен только к одному входу TIMx_CH, а настройками мультиплексоров (один канал использует режим
Direct, а другойIndirect) этот сигнал подключается к двум каналам. Таким образом, подобными настройками ситуация сводится к пункту 1. Сигнал подключен к одному входу TIMx_CH, в режимIndirectон подключается к "соседнему" каналу, а сам таймер настраивается в роли ведомого (Slave) с режимом сброса по триггеру, причем источником триггера является канал таймера, настроенный в прямом режиме. Таким образом, восходящий фронт приведет к срабатываниию триггера и сбросу счетчика в 0, а нисходящий - к событию захвата. В этом случае в соответствующем регистре CCR сразу лежит длительность и вычислять разницу не нужно.
Этот способ мы применим позже при изучении ведомого режима таймера. Пока же остановимся на варианте под номером 2.
Схема.
Предложенная задача является уже более сложной, чем примеры из предыдущих уроков, поэтому сначала разработаем схему. Для получения значений в программу будет добавлен вывод в порт UART, пока можно считать это "магией", так как в дальнейшем мы обязательно рассмотрим вопросы передачи данных, включая UART.
Схема максимально примитивная и содержит всего 4 элемента:
- Сам микроконтроллер Stm32F103C8T6
- Терминал для приема данных;
- Генератор прямоугольного сигнала;
- Осциллограф (чтобы наблюдать за сигналом).
В моем случае реальный стенд собран из следующих компонентов:
- Отладочная плата BluePill;
- Преобразовать USB<->UART и утилита Termilal v1.9b;
- Осциллограф (не пинайте меня!!!) Fnirsi-1014d со встроенным генератором.
Код.
#include <iopins.h>
#include <timer.h>
#include <usart.h>
using UsartConnection = Zhele::Usart1;
using InputTimer = Zhele::Timers::Timer4;
using InputCaptureRising = InputTimer::InputCapture<0>;
using InputCaptureFalling = InputTimer::InputCapture<1>;
void ConfigureUart();
void ConfigureTimer();
int main()
{
// Включение и конфигурирование UART
ConfigureUart();
// Включение и конфигурирование таймера и каналов захвата
ConfigureTimer();
for (;;)
{
}
}
// Настройка UART
void ConfigureUart()
{
UsartConnection::Init(9600);
UsartConnection::SelectTxRxPins<Zhele::IO::Pa9, Zhele::IO::Pa10>();
UsartConnection::WriteAsync("Hello", 5);
}
void ConfigureTimer()
{
// Включение таймера
InputTimer::Enable();
// Установка предделителя
InputTimer::SetPrescaler(7999); // 8 МГц / 8000 = 1 КГц. 1 тик = 1 мс
InputTimer::SetPeriod(65535); // Максимальный период (так что можем игнорировать случаи, когда CCR1 > CCR2)
// Выбираем линию PB6 как вход канала 1
InputCaptureRising::SelectPins<Zhele::IO::Pb6>();
// Захват по восходящему фронту
InputCaptureRising::SetCapturePolarity(InputCaptureRising::CapturePolarity::RisingEdge);
// Прямой режим (источник сигнала для 1 канала - CH1)
InputCaptureRising::SetCaptureMode(InputCaptureRising::CaptureMode::Direct);
// Включение канала
InputCaptureRising::Enable();
// Захват по нисходящему фронту
InputCaptureFalling::SetCapturePolarity(InputCaptureFalling::CapturePolarity::FallingEdge);
// Непрямой режим (источник сигнала для 2 канала - CH1, тот же PB6)
InputCaptureFalling::SetCaptureMode(InputCaptureFalling::CaptureMode::Indirect);
// Активация прерывания по захвату
InputCaptureFalling::EnableInterrupt();
// Включение канала
InputCaptureFalling::Enable();
// Запуск таймера
InputTimer::Start();
}
extern "C"
{
// Обработчик прерывания от таймера 4
void TIM4_IRQHandler()
{
// Так как все события таймера делят одно прерывание, то необходимо различать причины
// В нашем случае можно было этот условный оператор не применять, так как
// только событие захвата канала InputCaptureRising приводит к прерыванию
if (InputCaptureFalling::IsInterrupt())
{
// Вычисление длительности, так как 1 тик таймера = 1 мс, получаем результат сразу в мс
uint16_t duration = InputCaptureFalling::GetValue() - InputCaptureRising::GetValue();
// Сброс прерывания
InputCaptureFalling::ClearInterruptFlag();
// Асинхронная (с DMA) отправка длительности в UART
UsartConnection::WriteAsync(&duration, sizeof(duration));
}
}
}
Результаты эксперимента.
Встроенный в осциллограф генератор настроен в режим генерации прямоугольного сигнала со скважностью 50%, то есть для сигнала частотой 1 Гц на входе PB6: 500 мс низкий уровень, 500 мс высокий. Далее частота сигнала последовательно шесть раз увеличивается на 1 Гц (то есть до 7 Гц), а в программе можно наблюдать принятые от микроконтроллера данные (по 2 байта на каждый импульс).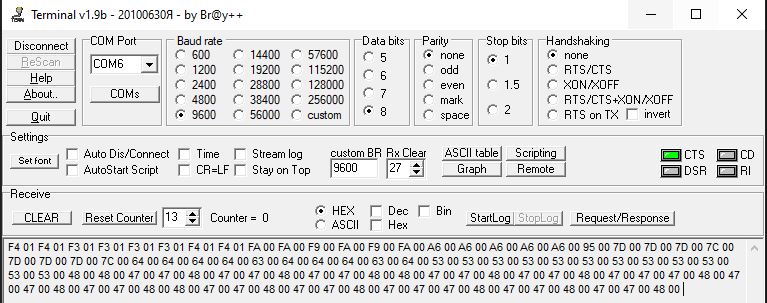
На рисунке можно выделить последовательности однаковых (почти) чисел:
- 0x01F3 (что равно 499) - длительность сигнала высокого уровня на частоте 1 Гц;
- 0x00FA (что равно 250) - длительность сигнала высокого уровня на частоте 2 Гц;
- 0x00A6 (что равно 166) - длительность сигнала высокого уровня на частоте 3 Гц;
- 0x007D (что равно 125) - длительность сигнала высокого уровня на частоте 4 Гц;
- 0x0064 (что равно 100) - длительность сигнала высокого уровня на частоте 5 Гц;
- 0x0053 (что равно 83) - длительность сигнала высокого уровня на частоте 6 Гц;
- 0x0047 (что равно 71) - длительность сигнала высокого уровня на частоте 7 Гц;
Таким образом, получился примитивный частотомер!
Полный код примера, как обычно, доступен на Яндекс.Диске.




Супер!
Отличная статья!
Я правильно понял, что из-за использования шаблонов нет большого расхода памяти?
Спасибо! На подходе про режимы Master/Slave 🙂
Да, так как много чего вынесено в compile-time и при компиляции схлопывается, освобождая от необходимости, например, какие-то лишние данные хранить или поля классов. Еще больше (я бы сказал, что в первую очередь) экономия процессорного времени, опять же за счет отсутствия лишних вычислений в рантайме. Однако надо заметить, что бесплатного ничего не бывает и в шаблонах платить приходится размером используемой Flash, так как, например, если есть шаблон таймера, то его инстансы Timer1 и Timer2 - это два разных типа (класса) и все методы там свои, то есть в некотором смысле дублированы.
Спасибо за ответ! У меня как раз вот Flash всегда остается много свободной в проектах, так что не критично )
Согласен, у меня тоже RAM, как правило, расходуется быстрее, чем Flash. Однако снова напомню, что бесплатного ничего не бывает, доступ к флешу медленный. Не уверен, что в реальных кейсах это даст негативный эффект, но не упомянуть тоже не могу (конвейер как-то умно подгружает инструкции, но есть задержки, способны ли они повлиять на скорость выполнения - не знаю 🙁 ).