





Вступление.
На прошлом занятии мы развернули рабочее пространство, а также собрали первый проект из готового исходника. Сейчас предлагается рассмотреть возможности по управлению портами и линиями ввода-вывода, предоставляемые библиотекой. Все классы для работы с GPIO доступны в заголовочных файлах <ioports.h> и <iopins.h>.
Интерфейс GPIO.
Библиотека Zhele предоставляет два основных семейства классов для работы с портами и линиями ввода-вывода:
- PortX, где X - буквенное обозначение порта. То есть в зависимости от целевого контроллера для программиста доступны классы Porta, Portb и так далее. Данные классы позволяют управлять портом ввода вывода:
- Включать и отключать тактирование порта.
- Читать и записывать значения.
- Задавать настройки порта (конфигурацию, режим, подтяжку, скорость) для конкретных линий (по маске).
- PXY, где X - буквенное обозначение порта, Y - номер линии. Опять же в зависимости от выбранного контроллера пользователю доступны различные классы, например, Pa1, Pa2 и так далее. Данные классы содержат аналогичный набор методов, только применяются они для конкретной линии.
Также для каждого класса линии ввода-вывода есть соответствующий ему класс с суффиксом Inv, который представляет собой инвертированную версию. Это актуально, например, для платы Blue Pill, на линии C13 которого расположен светодиод, однако для его включений необходимо подать на соответствующий пин логический 0.
Классы и методы ioports.
Заголовочный файл ioports предоставляет следующую иерархию классов: 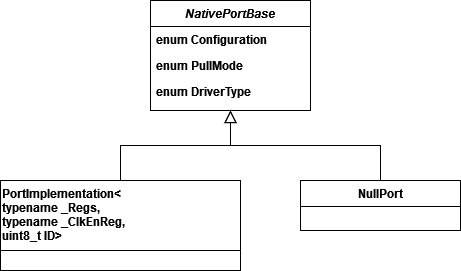
Базовый класс NativePortBase содержит перечисления для более строгого контроля типов (в этом, кстати, заключается одно из преимуществ C++ - строгий контроль за типами):
/// Конфигурация порта
enum Configuration
{
Analog = 0, ///< Аналоговый режим
In = 0x04, ///< Вход
Out = 0x03, ///< Выход
AltFunc = 0x0B ///< Альтернативная функция
};
// Режим порта
enum DriverType
{
PushPull = 0, ///< push-pull
OpenDrain = 4 ///< open-drain
};
/// Подтяжка
enum PullMode
{
NoPull = 0, ///< Без подтяжки
PullUp = 0x08, ///< Подтяжка к "+" (pull-up)
PullDown = 0x18 ///< Подтяжка к "-" (pull-down)
};
/// Скорость
enum Speed
{
Slow = 2, ///< Медленная (< 2 MHz)
Medium = 1, ///< Средняя (< 10 MHz)
Fast = 3 ///< Быстрая (< 50MHz)
};
Базовый класс в свою очередь расширяют два:
- NullPort - класс-заглушка, все операции которого не производят реальных действий.
- Шаблон PortImplementation - шаблон класса для конкретного порта ввода-вывода, имеет три шаблонных параметра:
- _Regs - обертка над регистрами порта (структурой GPIO_TypeDef).
- _ClkEnReg - обертка над регистром включения тактирования (об этом более подробно на следующих занятиях).
- ID - буква порта, по сути не используется, так что пояснения можно опустить.
Шаблон класса PortImplementation инстанцирован значениями, соответствующим реальным портам контроллера, например:
using Porta = PortImplementation<GPIOA, Zhele::Clock::PortaClock, 'A'>;
А программисту, соответственно, доступен новый тип Porta со своими статическими методами.
PortImplementation имеет интерфейс, представленный следующими статическими методами:
- DataType Read() - возвращает текущее значение регистра ODR.
- void Write(DataType value) - записывает значение в регистр ODR.
- void ClearAndSet(DataType clearMask, DataType setMask) - очищает и устанавливает линии, соответствующие маскам (через регистр BSRR).
- void Set(DataType value) - устанавливает значение линии по заданной маске (через регистр BSRR).
- void Clear(DataType value) - сбрасывает линии по заданной маске (через регистр BSRR).
- void Toggle(DataType value) - инвертирует вывод по заданной маске.
- DataType PinRead() - читает порт в режиме входа.
- void SetConfiguration(DataType mask, Configuration configuration) - устанавливает конфигурацию линий по заданной маске.
- void SetSpeed(DataType mask, Speed speed) - устанавливает скорость линий по заданной маске.
- void SetDriverType(DataType mask, DriverType driver) - устанавливает режим выхода по заданной маске.
- void SetPullMode(DataType mask, PullMode mode) - устанавливает подтяжку по заданной маске.
- void AltFuncNumber(DataType mask, uint8_t number) - устанавливает номер альтернативной функции по заданной маске (недоступно для контроллеров Stm32F1, поскольку у них модуль AFIO работает иначе).
- void Enable() - включает тактирование порта.
- void Disable() - выключает тактирование порта.
Для всех методов с параметрами библиотека предоставляет их шаблонный вариант, позволяющий сэкономить Flash-память за счет оптимизации, рекомендуется использовать именно шаблонный вариант, если настройки известны на этапе компиляции. Например, задать конфигурацию порта можно так:
Porta::SetConfiguration(0xffff, Porta::Configuration::Out);
А можно более оптимально:
Porta::SetConfiguration<0xffff, Porta::Configuration::Out>();
Пример управления портом A.
Решим элементарную задачу - настроить линии 0, 1, 3 порта A на выход (push-pull) и установить на них высокий уровень.
Porta::Enable(); Porta::SetConfiguration<0b1011, Porta::Configuration::Out>(); Porta::SetDriverType<0b1011, Porta::DriverType::PushPull>(); Porta::Set(0b1011);
Полный проект этого примера доступен на Яндекс.Диске.
Прошивка занимает 0 байтов RAM и 64 байта Flash (вместе со стандартным startup получается 28 и 380 соответственно). Запуск прошивки в Proteus демонстрирует, что программа работает правильно (высокий уровень на выходых PA0, PA1, PA3).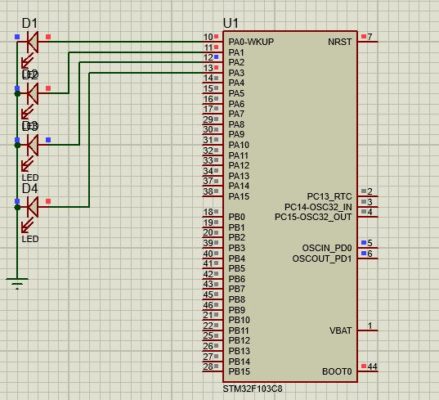
Классы и методы iopins.
Гораздо чаще на практике приходится взаимодействовать с отдельными линиями ввода-вывода. Для этих целей библиотека предоставляет набор классов, инстанцирующих шаблон класса TPin, содержащий те же самые методы, что и рассмотренный ранее класс, реализующий порт ввода-вывода. Очевидно, что методы конфигурации и настройки отдельной линии лишены первого параметра - маски. Решим ту же задачу используя три независимых типа: Pa0, Pa1, Pa3:
Pa0::Port::Enable(); Pa0::SetConfiguration<Pa0::Configuration::Out>(); Pa0::SetDriverType<Pa0::DriverType::PushPull>(); Pa0::Set(); Pa1::Port::Enable(); // Это лишнее, порт и так тактируется Pa1::SetConfiguration<Pa1::Configuration::Out>(); Pa1::SetDriverType<Pa1::DriverType::PushPull>(); Pa1::Set(); Pa3::Port::Enable(); // Это лишнее, порт и так тактируется Pa3::SetConfiguration<Pa3::Configuration::Out>(); Pa3::SetDriverType<Pa3::DriverType::PushPull>(); Pa3::Set();
Полный проект этого примера доступен на Яндекс.Диске.
Прошивка занимает уже 0 байтов RAM и 144 байта Flash (вместе со стандартным startup получается 28 и 460 соответственно). В Proteus мы получим ту же самую картинку.
Можно заметить, что было бы крайне удобно иметь возможность скомпоновать собственный виртуальный порт из заданных линий (желательно даже иметь возможность использовать линии из физически разных портов, например, PA0, PB5, PC15) и управлять им как целым. Такая возможность в библиотеке есть и будет рассмотрена на следующем занятии.
Статья в формате PDF доступна также на Яндекс.Диске.




Тема с метапрограммированием (шаблонами и константными выражениями), особенно развитыми в C++20 - ИМХО, очень правильная и перспективная.
Однако, о токоограничительных сопротивлениях в схеме (по 200-300 Ом, последовательно со светодиодами) забывать нельзя! Протеус, конечно, переживёт такое, но у реальной STMки выходной каскад выгорит легко!
Здорово описано, на выходных изучу весь курс.
Не так давно изменился порядок параметров в методах SetXXX, сначала настройка, потом маска. ТО есть во всех вызовах надо поменять аргументы местами (например, вместо Porta::SetConfiguration<0b1011, Porta::Configuration::Out>(); должно быть Porta::SetConfiguration<Porta::Configuration::Out, 0b1011>();. Сделано это дабы не плодить перегрузки и можно было задать значение по умолчанию 0xffff (весь порт целиком).
arm-none-eabi-gcc: fatal error: cannot execute 'cc1': CreateProcess: No such file or directory
compilation terminated.
*** [.pio\build\bluepill_f103c8\FrameworkCMSIS\gcc\startup_stm32f103xb.o] Error 1
Compiling .pio\build\bluepill_f103c8\FrameworkCMSIS\system_stm32f1xx.o
arm-none-eabi-gcc: fatal error: cannot execute 'cc1': CreateProcess: No such file or directory
compilation terminated.
*** [.pio\build\bluepill_f103c8\FrameworkCMSIS\system_stm32f1xx.o] Error 1
не могу собрать проект с первого урока, может кто подскажет что не так?
На какой операционке и как устанавливали тулчейн? Судя по выводу, дело только в тулчейне. Попробуйте переустановить, если безуспешно, постучитесь в телеграм (в группе или в ЛС можно)
тулчейн скачал вот этот - gcc-arm-none-eabi-10.3-2021.10-win32.zip ,распаковал и заменил в директории .platformio/packages/toolchain-gccarmnoneeabi папки share , arm-none-eabi ,share ,lib. операционка у меня винда 10.
да и сама PlatformIO при запуске в консоли тож пишет - [06.05.2025, 20:58:09] Не удалось разрешить конфигурацию с compilerPath "C:/.platformio/packages/toolchain-gccarmnoneeabi/bin/arm-none-eabi-gcc.exe". Вместо этого используется "cl.exe".
вот такие странные дела...)) весь софт уже переустанавливал, не помогло...
Думаю, что с тех пор PlatformIO должен был апнуть уже версию тулчейна, можно удалить эту директорию и попытаться на дефолтной версии, вполне можно ожидать, что всё ОК. Я давно переехал на CMake, можно в Readme репозитория увидеть инструкцию