





В интернете очень много информации, но по теме ООП + STM32 я её встречал мало. В серии статей я попытаюсь рассказать, как я пришёл к ООП ни как к таковому, а именно на микроконтроллерах от фирмы ST. Это не моё НоуХау. Это то, что я сумел собрать для себя и то, чем я пользуюсь для облегчения программирования в своих разработках.
Примечание: Предусматривается, что компьютер знают все и рассказывать, где какая кнопка находится, я не буду.
Среда разработки: CubeMX, CubeIDE. Всегда последней версии.
Микроконтроллеры: Серия STM32
Для начала я покажу, как у меня организовано дисковое пространство. Это не догма. Просто мне так удобнее. Каждый сам для себя должен решить, как ему удобнее. Но последующие статьи я буду писать со ссылкой именно на такую организацию:

Все свои проекты я храню в каталоге WorkDevel. Он содержит подкаталоги:
- AltiumLib - библиотеки Altium Designer;
- Datasheet - даташиты на электронные компоненты;
- Developer - каталог, хранящий все проекты;
- Examples - примеры не привязанные к МК. Могу наполнять этот каталог без описания в статьях. Будет время заглядывайте, может найдёте что то интересное;
- Project_Lesson_01 - это тот первый каталог, в котором мы с вами будем работать;
- Code_CPP - здесь будут подкаталоги с нашим кодом. На больших проектах там может быть не один каталог.
- Output - сюда я вывожу Gerber файлы для заказа их в Китае;
- Pcad - здесь хранятся проекты схем и плат. Так же как и в Code_CPP, на больших проектах может содержать несколько подкаталогов;
- Source - сюда складываю первичную информацию. Техзадания, даташиты на элементы, участвующие именно в этом проекте. И так далее;
- Tests MK - здесь храним примеры для разных МК, которые будут описаны в последующих статьях;
- STM32Lib - каталог, где хранятся библиотеки и программные ядра на каждый тип микроконтроллера.
- Device - библиотеки, зависимые от типа ядра МикроКонтроллера (МК);
- Library - библиотеки, независимые от типа MK.
Так как я работаю на разных компьютерах, данная структура позволяет мне переносить проекты с компьютера на компьютер без потери данных и не заморачиваться каждый раз, где что лежит, и не важно, какая буква присвоена диску. Даже на те, которые не подключены к интернету.
Вот теперь можно приступить.
Примечание: То, что я буду давать, будет применимо к любому ядру МК. В случае, если есть какие-то отличия между ядрами в инициализации периферии, я постараюсь на этом заострять внимание.
Вы можете проделать показанные мною операции для любого ядра МК. Я же покажу всю цепочку на STM32F407VET6. Так как для него у меня более полные библиотеки. Но никто не мешает вам, взяв его библиотеки за пример, дописать свои.
Создание проекта.
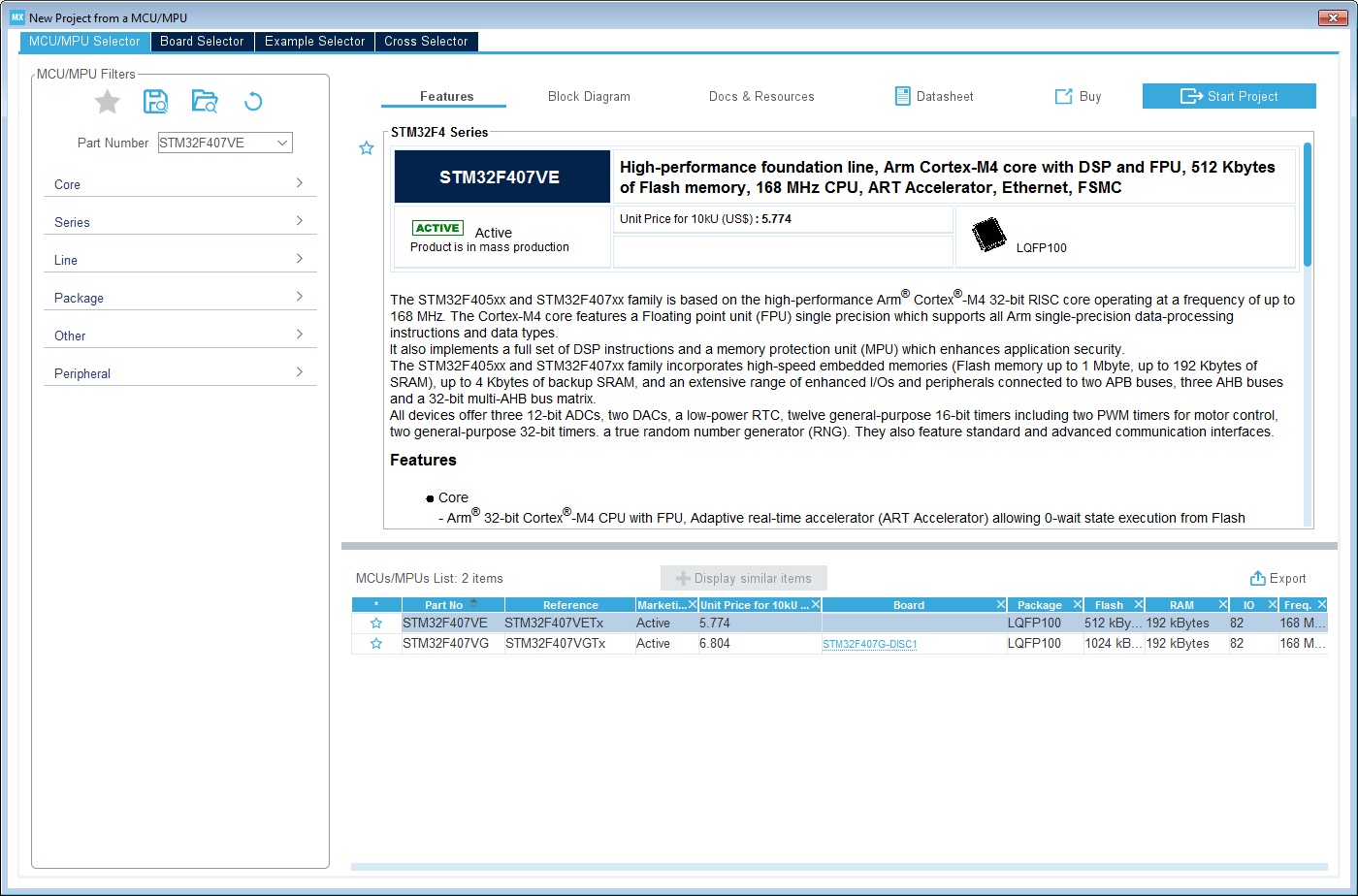
Загружаем CubeMX и выбираем нужный нам МК:
Никакую периферию мы не инициализируем, а сразу идём на закладку Project Manager:
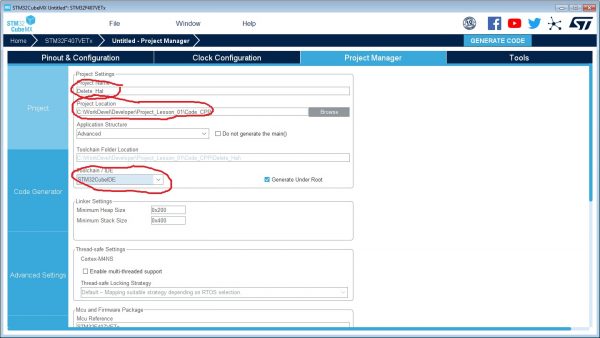
Здесь нас интересуют только три поля:
- Project Name - имя проекта. Вводим имя, по которому будем идентифицировать проект.
- Project Location - выбираем каталог, в котором будет храниться наш проект. В данном случае С:\WorkDevel\Developer\Project_Lesson_01\Code_CPP
- Toolchain\IDE - выбираем STM32CubeIDE.
Затем слева выбираем Code Generator и ставим галку напротив первого пункта в разделе Generated files:
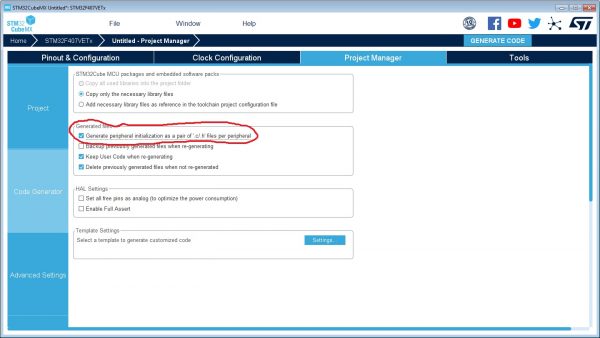
В данном проекте нам она погоды не сделает, но привычка позволит в более сложных проектах разбивать функции инициализации периферии по отдельным файлам. Что весьма удобно. Почему-то не все это любят. Есть такие, что пишут портянки по 5000 строк в одном файле. А можно было разбить код на отдельные логически блоки и раскидать их по файлам.
Подготовка закончена, генерируем код (кнопка справа вверху Generate Code):
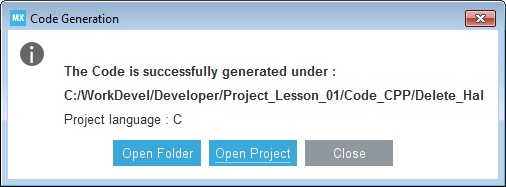
Нам предлагается или открыть каталог с проектом, или открыть его сразу в IDE, или всё на этом. Выберем открытие проекта. Загружается выбранная IDE, в нашем случае CubeIDE. После загрузки проекта открываем main.c:
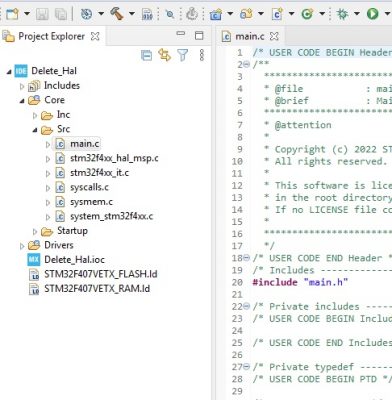
Пробуем компилить, никаких ошибок быть не должно:
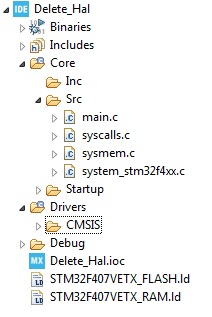
Теперь начинаем методично уничтожать HAL. В каталоге Inc удаляем все файлы, в каталоге Src оставляем только те файлы, которые на картинке, в каталоге Drivers удаляем весь подкаталог STM32F4xx_HAL_Driver:
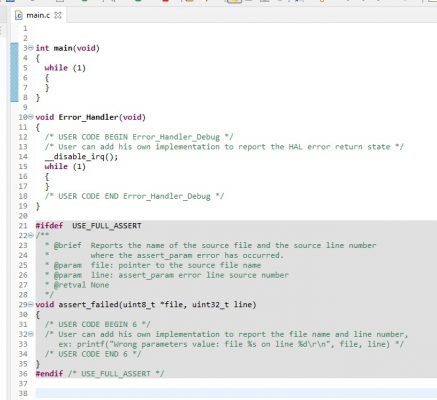
В main.c удаляем всё, кроме указанного на картинке:
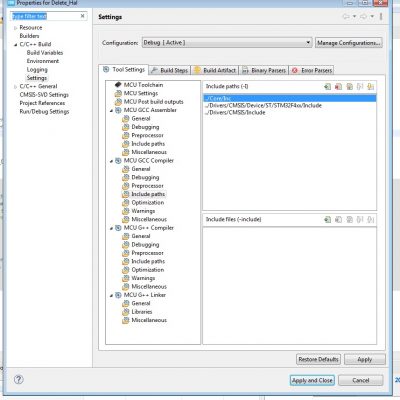
Идём в меню Project>Properties>C/C++ Build>Settings, закладка Tool Settings, MCU GCC Compiler>Preprocessor. Вверху выбираем All Configurations и грохаем USE_HAL_DRIVER:
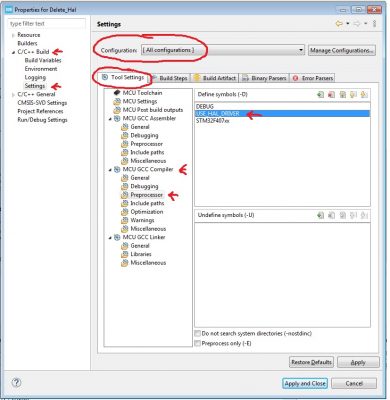
Нажимаем Apply. Идём в Include Paths, там удаляем всё упоминание о HAL:
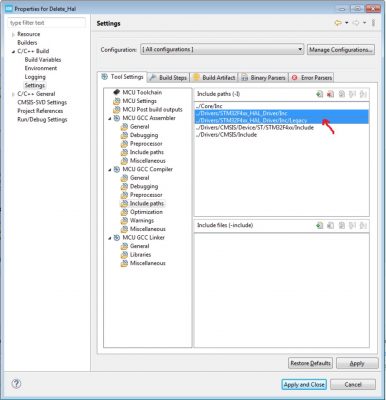
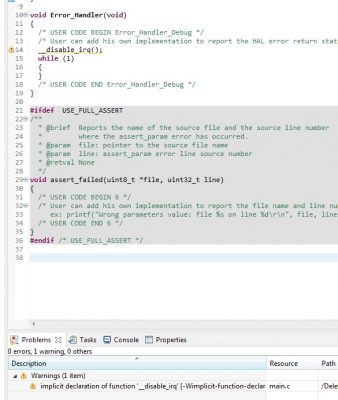
Нажимаем Apply и Apply and Close. Пытаемся компилить и получаем одно предупреждение. Необходимо эту строку закомментировать. Не удалять ни в коем случае, она позже вам пригодится:
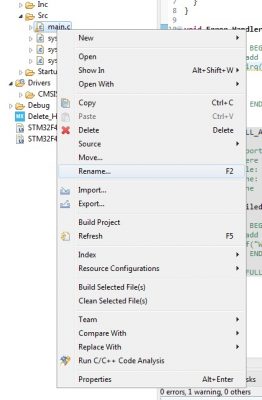
Нажимаем правой кнопкой на проекте и выбираем конвертацию в С++:

Вроде визуально ничего не изменилось. Но если посмотреть здесь:
У нас появился новый пункт: MCU G++ Compiler. Переименовываем main.c в main.cpp и пробуем компилить:
Выдаётся такая ошибка:
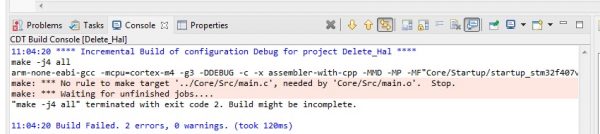
Ничего страшного. Идём сюда и выбираем Clean Project:

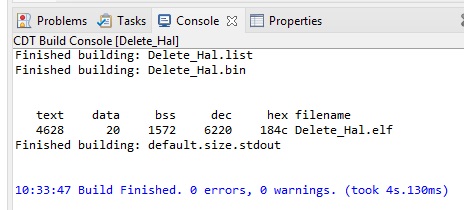
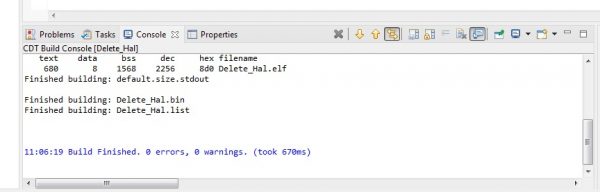
Компилируем снова и получаем 0 ошибок:
На этом пока всё. Позже покажу как подключать библиотеки находящиеся в STM32Lib.
Тема на форуме - перейти.




Спасибо, интересно, буду ждать следующие части.
Да, да, да, как раз это я и искал в такой доступной форме. Жду продолжения
Раз форма считается доступной, придётся продолжать.
🙂
Все равно продолжает выскакивать ошибка error: '__disable_irq' was not declared in this scope
16 | __disable_irq();
Закомментируйте её. Когда выполните следующие шаги из последующих статей, ошибка пропадёт.
Кроме всего прочего, библиотеки развиваются дальше, что может вызывать ошибки при компиляции в предыдущих статьях.
Нужна статья как этого избежать.
Спасибо за раскрытие этой темы! Очень интересно! Тоже жду следующие части.)
Где сейчас можно скачать cube ide или mx, свежие версии?
st.com сейчас совсем не дают скачивать.
https://disk.yandex.ru/d/Sqb3kIEuMv2MoQ
CubeMX 6.4 и 6.5 глючные
Доброго времени ) Подскажите пожалуйста, только заинтересовался темой . С чего начать, чтобы было понятнее содержание статей по STM & с++. Если у меня никакого HAL не было то я могу начать с этой статьи, пренебрегая действиями с HAL? спасибо.
Добрый день. Начинать нужно с этой статьи. Хоть здесь и в нескольких последующих нет С++, без понимания с чего это всё началось будет сложно разобраться в последующих статьях.
Наконец то нашёл дельную статью, может поможет наконец то пересесть с Microchip IDE.
А чем Вам не нравится MPLABX?
Очень мощная среда сразработки. Мощнее CubeIDE.
Я от PIC ушёл из за того, что какие то невнятные у них микроконтроллеры.
Д всем устраевает, кроме того, что досталось мне очень много stm32f100. и жало их выбрасывать, пущай в дело идут.
Если что, свистите. Помогу чем смогу.
Вот и добрался я до экспериментов. И тут же впёрся в синтаксис HAL.
Думаю нужен вашь совет, не пойму что не так с простейшим кодом.
Написал 2 карианта управления пином, оба компилируются и загружаются в чип без ошибок. Но диод на макетке молчит.
{
/* USER CODE END WHILE */
HAL_GPIO_WritePin(13_GPIOC_Port,13_Pin,1); //1
HAL_GPIO_WritePin(GPIOС, GPIO_PIN_13, GPIO_PIN_SET); //2
HAL_Delay(60);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET); //2
HAL_GPIO_WritePin(13_GPIOC_Port,13_Pin,0); //1
HAL_Delay(100);
/* USER CODE BEGIN 3 */
}
Где я что то не догоняю?
Макетка простенькая - STM32F103C8 (Blue Pill)
за ранее спасибо!
Всё, терпения моего на HAL не хватило, убил я его по инфе в вашей статье.
Если не трудно, не мешала бы статья для перешедших на классы по конфигурированию контроллера, желательно на примере какой нибудь простенькой мигалки диодом.
Что то пока тяжело CUBE даётся, но мы не сдаёмся!
Попробуй как здесь, один в один сделать - https://microtechnics.ru/stm32cube-ispolzovanie-portov-vvoda-vyvoda-gpio/. Ну вывод другой только соответственно.
К сожалению времени на изучение более не осталось!
Срочно нужен продукт.
К счастью пробный код проглотил и превосходно отработал в Platformio. Осталось почитать про активацию и настройку встроенных часов с внешним кварцем на 32.768.
Но, после, я продолжу добивать CUBE.
В любом случае спасибо за помощь!!!
#include "STM32.h"
#include "IO_Digital.h"
// На моей плате светодиоды здесь. Правьте в соответствии со схемой своей плыты
#define LED_GPIO GPIOC
#define LED_PIN GPIO_PIN_0
IO_Digital Led(LED_GPIO, LED_PIN, Output, No_Pull);
int main(void)
{
SystemClock_Config(Quartz_8); // Инициализируем тактовый генератор
while(1)
{
Led.digitalWrite(High); // Устанавливаем выход в высокое состояние
delay(500);
Led.digitalWrite(Low); // Устанавливаем выход в низкое состояние
delay(500);
// Можно ещё так
// Устанавливаем выход в противоположное состояние. Так как предыдущая команда установила его в "0",
// эта команда переведёт его в противоположное состояние, т.е. "1"
Led.digitalTogglePin();
delay(200);
// Устанавливаем выход в противоположное состояние. Так как предыдущая команда установила его в "1",
// эта команда переведёт его в противоположное состояние, т.е. "0"
Led.digitalTogglePin();
delay(200);
}
}
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
// __disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
Привет. Если на моих библиотеках, по моим статьям.
Моргание диодом на классах.
Для RTC код то же есть.
А в примере с HAL задержки короткие, можно не увидеть как моргает.
Эдуард, здравствуй.
Всё сделал как в твоей статье. Но у меня выводит 3 ошибки
../Core/Src/main.cpp: In function 'void Error_Handler()':
../Core/Src/main.cpp:14:3: error: '__disable_irq' was not declared in this scope
14 | __disable_irq();
| ^~~~~~~~~~~~~
make: *** [Core/Src/subdir.mk:32: Core/Src/main.o] Error 1
make: *** Waiting for unfinished jobs....
"make -j16 all" terminated with exit code 2. Build might be incomplete.
контроллер stm32L031
Завтра гляну.
И можно Ваш проект.
https://disk.yandex.ru/d/pIXf9Ujw02vPNw
Спасибо
У Вас F103 контроллер, но ошибка не из за этого.
В статье прямо указано, что ошибка будет.
Полностью рабочий пакет Вы получите прочитав три статьи подряд. И выполняя всё пошагово.
Будьте внимательнее
Данный подход только усугубляет разработку ПО. Зачем переписывать отлаженный и проверенный код (HAL или LL) написанный под все МК. В C++ ни кто не мешает вызывать си код. Зачем тратить время на переписывание кода, когда можно переходить сразу к написанию логики устройства(прибора). А библиотеки под USB и Ethernet вы тоже будете переписывать?!
FLASH - 8 кило. Всю её занимает инициализация на HAL. Под код места не остаётся.Работа с дисплеями. Особенно под FSMC. Один раз написал класс и пользуешься всю жизнь.Любая периферия. Написал класс и у тебя удобная библиотека для работы. Не нужно дёргаться с кучей дефайнов и подтыкать их HAL.Библиотека USB под HAL работает через жопу. (Простите за мой русский). И да, я занимаюсь её модернизацией. Понадобится LAN перепишу и её.
Кроме того HAL очень неповоротлив и громоздок. Ошибок в нём куча. Это не заметно, когда работаешь с парой - тройкой кристаллов. Когда смотришь всю линейку, всё это сильно напрягать начинает.
По многим пунктам спорно )
Ну, собственно, это вечная тема, что 10 лет назад были споры, что сейчас.
Я часто сталкиваюсь с тем, что программирующие на HAL отрицательно относятся к С++.
Но единственный их довод "Проинициализировал всё на HAL, дописал пару строк, прошивка готова".
Я же не бегаю по форумам и не кричу, что HAL отстой. Сижу себе тихонечко, программирую как мне нравится. Учусь новым методам в программиовании.
Те, кто начинал сразу писать на С++, HAL не пользуются. Если библиотек не хватает, пишут сами.
В целом, вопросов нет, разные подходы имеют право на жизнь.
Реплика от начинающего (завтра буду мигать светодиодом 🙂 )
Размер программы для контроллера, как правило, не имеет значения. Можно выбрать другой.
1 - быстродействие
2 - простота и минимальное время написания и отладки
Все
Другой ещё нужно купить.
И не занимайтесь передёргиванием фактов. Есть чип. Есть задача сделать на нём устройство. HAL не позволяет. ВСЁ.
1 - быстродействие? Что подразумевается под этим? Скорость написания программы или её быстродействие? Под С++ пишется быстрее, чем под HAL. Особенно драйвера на разное железо. Если вы используете штук 10 разных датчиков и дисплей, кнопки и тач, заплюхаетесь под HAL писать.
Прошивка написанная под HAL работает медленнее, так как у HAL очень много проверок для защиты от дурака.
2 - Простота? Особенно когда один из модулей HAL написан индусом? И в нём ошибок больше, чем пальцев у роты солдат.
А с другой стороны, не нравится, не используйте.
Ещё раз повторюсь. Я не лезу к вам с рассказами какое г***о этот HAL и вы не лезьте ко мне с рассказами какое г***о этот С++.
Грубо? Зато честно.
Хто тебя покусал?
Очень много эмоций и букоффф 🙂
Я использую простые инструменты - Rad Studio (C++) и CCS C compiler (эти инструменты не для академикоффф, а для тех кому нужен результат 🙂
Простота#use rs232(baud=2000000) // 2Mbit
putc(read_adc());
Всё 🙂 В RS тоже две строчки
Быстродействие - максимально возможное для данного PIC, не нужно программировать
никакие регистры
"Но есть ньюанс". Быстродействия АЦП недостаточно. При использовании 32 разрядной арифметики первой (сразу) заканчивается оперативная память, а не флеш память 🙂 и это не экзотика - 32 разрядных "датчиков" - навалом.
Поэтому вынужден переходить на STM. Ну, я непростительно долго уклонялся от этого 🙂
Вот Гуру могли бы быть более .снисходительны к начинателям мигания гирляндами, Новый год жеж скоро 🙂
Извините.
Ваше сообщение написано сумбурно. Я к такому не привык. Я просто не понял, что Вы хотели сказать.
Просто, последнее время, очень много критиков не предлагающих никаких решений и не могущих объяснить свою позицию.
Я Вас принял за такого. Вот и вспылил.
Я и сам с PIC перешёл на STM 8 лет назад. И столкнулся с тем, что все программируют под HAL, а мне показалось, что удобнее на классах и шаблонах.
Начинающим мигателям светодиодами без HAL'а никак 🙂
Попробовал АЦП, USB - Virtual Port Com - работает. При полном отсутствии информации об архитектуре STM и регистрах. Для PIC'ов это просто невозможно.
Миграция на С++ - это не редкость. Из простых примеров - Koboldcpp, из не очень - Comfyui. "Почему бы нет 🙂 "
С Наступающим!
А при чём здесь STM и Иммитация Интелекта?