





Доброго времени суток! Сегодня мы займемся изучением GPIO. И, в первую очередь, давайте посмотрим в каких режимах могут работать порты ввода-вывода в STM32F10x. А режимов этих существует море, а именно:
- Input floating
- Input pull-up
- Input-pull-down
- Analog
- Output open-drain
- Output push-pull
- Alternate function push-pull
- Alternate function open-drain
То есть при работе на вход:
- Вход – Hi-Z
- Вход – подтяжка вверх
- Вход – подтяжка вниз
- Вход – аналоговый
При работе порта на выход имеем следующие варианты:
- Выход – с открытым коллектором
- Выход – двухтактный
- Альтернативные функции – выход типа "с открытым коллектором"
- Альтернативные функции – двухтактный выход
Вот кстати документация на STM32F103CB - STM32F103CB. В даташите есть внушительная таблица, в которой показано, какие альтернативные функции имеются у конкретного вывода. Вот, например, выводы PA9, PA10:
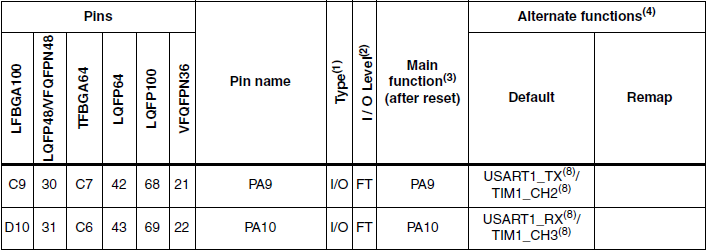
В столбце Default видим, какие функции будут выполнять эти пины при их настройке для работы в режиме Alternative function. То есть, настроив эти пины соответствующим образом они из просто PA9 и PA10 превратятся в Rx и Tx для USART1. А для чего же тогда столбец Remap? А это не что иное, как очень полезная функция ремаппинга портов. Благодаря ремапу, Tx USARTA ’а, например, может переместится с пина PA9 на PB6. Довольно часто эта функция оказывается невероятно полезной.
Ну с режимами вроде бы все более-менее понятно, пришло время окинуть взором регистры, которыми порты ввода-вывода управляются.
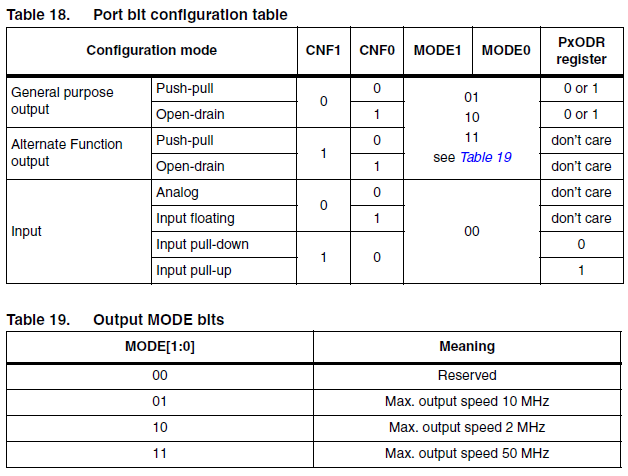
Раз уж только что обсудили в каких режимах могут существовать выводы STM32F10x, сразу же давайте разберемся, как же их можно собственно перевести в нужный режим. А для этого выделены два регистра – CRL и CRH. В первом конфигурируются выводы от 0 до 7, во втором, соответственно от 8 до 15. Регистры, как вы помните, 32-х разрядные. То есть на 8 выводов приходится 32 бита - получается 4 бита на одну ножку. Открываем даташит и видим:
Например, надо нам настроить ножку PB5. Идем в регистр GPIOB->CRL и выставляем соответствующие биты так как нам требуется (на картинке 32-х битный регистр CRL). Для PB5 это биты:

После 8-битных контроллеров все это может показаться сложным и нелогичным, но на самом деле реализовано все довольно изящно. Посмотрим, что тут есть еще...
- Выходной регистр GPIOx_ODR – напоминает регистр PORTx в AVR. Все что попадает в этот регистр сразу же попадает во внешний мир. Регистр 32-разрядный, а ножек всего 16. Как думаете, для чего используются оставшиеся 16? Все очень просто, биты регистра с 15 по 31 не используются вовсе )
- Входной регистр GPIOx_IDR – аналог PINx в AVR. Структура его похожа на упомянутую структуру ODR. Все, что появляется на входе микроконтроллера, сразу же оказывается во входном регистре IDR.
- Еще два полезных регистра GPIOx_BSSR и GPIOx_BRR. Они позволяют менять значения битов в регистре ODR напрямую, без использования привычных бит-масок. То есть, хочу я, например, выставить в единицу пятый бит ODR. Записываю единичку в пятый бит GPIOx_BSSR, и все, цель достигнута. Вдруг захотелось сбросить пятый бит ODR - единицу в 5 бит GPIOx_BRR и готово.
Итак, основные регистры рассмотрели, но, на самом-то деле, мы в наших примерах будем делать все иначе, используя Standard Peripheral Library. Так что идем изучать библиотеку.
Время традиционной вставки: поскольку компания STMicroelectronics прекратила поддержку библиотеки SPL, которая использовалась в этом курсе, я создал новый, посвященный работе уже с новыми инструментами, так что буду рад видеть вас там - STM32CubeMx. Кроме того, вот глобальная рубрика по STM32, а также статья на смежную тему из нового курса: STM32 GPIO. Настройка портов ввода-вывода в STM32CubeMx.
За GPIO в SPL отвечают файлы stm32f10x_gpio.h и stm32f10x_gpio.c.За конфигурацию портов отвечает структура GPIO_InitTypeDef:
typedef struct
{
uint16_t GPIO_Pin; /* Specifies the GPIO pins to be configured. This parameter can be any value of @ref GPIO_pins_define */
GPIOSpeed_TypeDef GPIO_Speed; /* Specifies the speed for the selected pins. This parameter can be a value of @ref GPIOSpeed_TypeDef */
GPIOMode_TypeDef GPIO_Mode; /* Specifies the operating mode for the selected pins. This parameter can be a value of @ref GPIOMode_TypeDef */
}GPIO_InitTypeDef;
Видим, что структура имеет три поля: GPIO_PIN, GPIO_Speed и GPIO_Mode. Нетрудно догадаться, что первая отвечает за номер ножки порта, которую мы хотим настроить, вторая – за скорость работы порта, ну и третья, собственно, за режим. Таким образом, для настройки вывода нам всего лишь нужно объявить переменную типа GPIO_InitTypeDef и заполнить ее поля нужными значениями. Все возможные значения полей тут же – в stm32f10x_gpio.h. Например,
typedef enum
{
GPIO_Mode_AIN = 0x0,
GPIO_Mode_IN_FLOATING = 0x04,
GPIO_Mode_IPD = 0x28,
GPIO_Mode_IPU = 0x48,
GPIO_Mode_Out_OD = 0x14,
GPIO_Mode_Out_PP = 0x10,
GPIO_Mode_AF_OD = 0x1C,
GPIO_Mode_AF_PP = 0x18
}GPIOMode_TypeDef;
Все значения уже рассчитаны создателями SPL, так что для настройки какого-нибудь вывода для работы в режиме Output push-pull надо всего лишь в соответствующей структуре задать поле: GPIO_Mode = GPIO_Mode_Out_PP.
Ну вот, структура объявлена, поля заполнены как надо, что же дальше? Ведь мы всего лишь создали переменную. Причем тут регистры, микроконтроллеры и вообще электроника? Лезем в файл stm32f10x_gpio.c и находим там множество различных функций для работы с GPIO.
Рассмотрим функцию GPIO_Init() (код приводить не буду, все в файле библиотеки). Так вот, эта функция как раз и связывает нашу созданную структуру и конкретные регистры контроллера. То есть мы передаем в эту функцию переменную, в соответствии с которой выставляются нужные биты нужных регистров микроконтроллера. Все очень просто. Поковыряйте еще файлы библиотеки. Там функции на любой случай есть 🙂 Кстати очень удобно – перед функцией идет описание переменных, которые она принимает и возвращает, а также описание собственно того, что эта функция призвана делать. Так что, разобраться несложно.
Отвлечемся ненадолго от портов ввода-вывода и обсудим один довольно тонкий момент. Чтобы использовать порты, либо любую другую периферию, обязательно надо включить тактирование. И порты, и периферия изначально отключены от тактирования, так что без этого действия ничего не заведется. Программа скомпилируется, но на деле работать ничего не будет. За тактирование в SPL отвечают файлы stm32f10x_rcc.c и stm32f10x_rcc.h. Не забывайте добавлять их в проект.
Давайте уже перейдем к программированию. Как это принято, заставим диод помигать 👍 Чтобы лучше разобраться с Standard Peripheral Library немножко усложним обычное мигание диодом – будем опрашивать кнопку, и если она нажата – диод загорается, иначе – гаснет. Запускаем Keil, создаем проект, добавляем все нужные файлы, не забываем про CMSIS. Из SPL для этого проекта нам понадобятся 4 файла, уже упомянутые выше. Создание нового проекта описано в предыдущей статье учебного курса и также там можно найти ссылки на библиотеки.
Итак, код:
/***************************************************************************************/
//Подключаем все нужные файлы
#include "stm32f10x.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_gpio.h"
/***************************************************************************************/
//Тут будет вся инициализация всей использующейся периферии
void initAll()
{
// Объявляем переменную port типа GPIO_InitTypeDef
GPIO_InitTypeDef port;
// Это функция из файла stm32f10x_rcc.c, включает тактирование на GPIOA
// GPIOA сидит на шине APB2
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
// Про эту функцию напишу чуть ниже
GPIO_StructInit(&port);
// Заполняем поля структуры нужными значениями
// Первый вывод – вход для обработки нажатия кнопки – PA1
port.GPIO_Mode = GPIO_Mode_IPD;
port.GPIO_Pin = GPIO_Pin_1;
port.GPIO_Speed = GPIO_Speed_2MHz;
// А про эту функцию мы уже говорили
// Отметим только что один из параметров – указатель(!) на нашу структуру
GPIO_Init(GPIOA, &port);
// Настраиваем вывод, на котором будет висеть диод – PA0
port.GPIO_Mode = GPIO_Mode_Out_PP;
port.GPIO_Pin = GPIO_Pin_0;
port.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(GPIOA, &port);
}
/***************************************************************************************/
int main()
{
// Объявляем переменную для хранения состояния кнопки
uint8_t buttonState = 0;
initAll();
while(1)
{
// С помощью функции из SPL считываем из внешнего мира состояние кнопки
buttonState = GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_1);
if (buttonState == 1)
{
GPIO_SetBits(GPIOA, GPIO_Pin_0);
}
else
{
GPIO_ResetBits(GPIOA, GPIO_Pin_0);
}
}
}
/***************************************************************************************/
Кстати, возможно кто-то обратит внимание на наличие скобок { }, несмотря на всего лишь одну инструкцию в теле if и else. А это уже привычка ) Очень рекомендую так писать, особенно при разработке крупных проектов. При дописывании/исправлении программы невнимательный программист может не обратить внимания на отсутствие скобок и дописать вторую инструкцию, которая, как вы понимаете, уже окажется все блока if или else. Та же тема с циклами. Когда над проектом работает много народу, нет никаких гарантий, что кто-нибудь не окажется невнимательным, так что, чтобы не тратить минуты/часы на последующие поиски ошибки, рекомендую ставить эти скобки всегда.
Нажимаем F7, компилируем, и вот наша первая программа для STM готова. Вроде бы код довольно подробно откомментирован, так что поясню только пару моментов.
Функция GPIO_StructInit(&port) – принимает в качестве аргумента указатель на переменную port. Эта функция заполняет поля структуры, переданной ей в качестве аргумента значениями по умолчанию.
Еще две функции, которые мы использовали:
- GPIO_SetBits(GPIOA, GPIO_Pin_0);
- GPIO_ResetBits(GPIOA, GPIO_Pin_0);
Ну вы и так догадались для чего они 🙂 Итак, на этом сегодня заканчиваем, а в следующей статье познакомимся со средствами Keil’а для отладки наших программ!




Добрый день! Я вижу у вас в Keil комментарии на русском языке. У меня при переключении на русский Keil печатает какую-то абракадабру. Может где-то в настройках надо что-то задать, не подскажете? Я так и не нашел.
Попробуй зайти в Edit -> Configuration -> Colors & Fonts -> "8051: Editor C Files"
параметр "//Comment" и установить ему шрифт "FixedSys"
Странно, но у меня вообще нет пункта "8051: Editor C Files". Версия Keil 6.50.
Попробуй тогда там же в Colors&Fonts - C/CPP Editor Files - Line comment - Font - у меня стоит Courier new
Нужно изменить кодировку файла. Скачай Notepad++ и им перекодировать.
Добрый день!
Попробовал скомпилировать получил 44 варнинга и ошибку
stm32f10x_rcc.c(1451): warning: #223-D: function "assert_param" declared implicitly
а вот ошибка
.\p1.axf: Error: L6218E: Undefined symbol assert_param (referred from stm32f10x_gpio.o).
Подскажите, что не так.
Спасибо
Все таки скомпилировал...
благодаря
http://easyelectronics.ru/rabota-s-stm32f10x-standard-peripherals-library.html
пытаюсь запустить дебагер выдает сообщение
*** error 65: access violation at 0x40021000 : no 'read' permission
Надо было смотреть статью про создание проекта сначала) По поводу дебагера - а какой контроллер вообще используется?
да не заметил...
контролер stm32f107vc
Поставь 103-ий какой-нибудь и отладка заработает
Или именно цель стоит этот использовать?
Да, действительно на 103-м работает...
Но мне надо 107...
на 103-х нет ethernet...
В проекте меняю используемый чип с 103 на 107 - возникает ошибка при отладке... меняю назад на 103 - все хорошо... Как-то можно данную проблему победить?
В Кейле просто встроенный отладчик нормально работает только для stm32f103, поэтому тут только один вариант - отладка в железе
Подскажите пожалуйста как например вывод PB03 настроить как цифровой вход с подтяжкой на землю и/или с подтяжкой к питанию.
Надо поле структуры GPIO_Mode задавать, вот возможные значения: GPIO_Mode_AIN, GPIO_Mode_IN_FLOATING, GPIO_Mode_IPD, GPIO_Mode_IPU, GPIO_Mode_Out_OD, GPIO_Mode_Out_PP, GPIO_Mode_AF_OD,
GPIO_Mode_AF_PP
IPD, например, вход с подтяжкой вниз, IPU - подтяжка вверх
А как это сделать не используя SPL, через CMSIS.
GPIOB->CRL &=~GPIO_CRH_MODE3_0;
GPIOB->CRL |= GPIO_CRH_CNF3_1;
Вот, например для входа с подтяжкой вниз:
GPIOB->CRL |= GPIO_CRH_CNF3_1;
Бит CNF1 в единицу.
И в GPIOB_ODR надо выставить в ноль третий бит.
Я делаю вот так:
GPIOA->CRL &= ~GPIO_CRL_MODE5;
GPIOA->CRL |= GPIO_CRL_CNF5_1;
GPIOA->ODR = 0xFFFF; //в pull-up;
Замеряю напряжение на выводе PA05, оно равно 0 :(. Я так предпологаю что там должно быит напряжение питания?
Ну да, все вроде верно
Теперь делаю так:
RCC->APB2ENR|= RCC_APB2ENR_IOPAEN | RCC_APB2ENR_IOPBEN;
RCC->CFGR |= RCC_CFGR_MCO_SYSCLK;
GPIOA->CRH |= GPIO_CRH_MODE11_1; // Настраиваем на выход
GPIOA->CRH &= ~GPIO_CRH_CNF11; // Симметричный выход
GPIOB->CRL &= ~GPIO_CRL_MODE0; // Настраиваем на вход
GPIOB->CRL |= GPIO_CRL_CNF0_1; // С подтяжкой 0x44444448
GPIOB->ODR = 0xFFFF;
НО если вместо GPIO_CRL_CNF0_1 подставить 0x44444448 то все работает! Что это может быть? подскажите?
Странно все это ) Кинь проект, я прошью, попробую
Скидывать не буду, подсказали:)
"
После сброса конфиг выглядит так :
CNF 01 MODE 00 - Input float
Ты ставишь CNF0_1 получаешь :
CNF11 MODE 00
Что соответствует Reserved а не Input c pullup ."
Но все равно спс! 🙂
Здравствуйте.Пытаюсь делать в точности так,как Вы описываете. Код с этой страницы. Компиляция проходит успешно. Запускаю симулятор - выдаётся ошибка " *** error 65: access violation at 0x40021000 : no 'read' permission " . Контроллер stm32f103cb
Подскажите, как справиться с этой проблемой.
Настройки отладчика точно верные? И контроллер в проекте тот, что надо выбран?
контроллер:
в меню options for Target `STM32` вкладка Device
указан STM32F103CB
Настройки отладчика:
в меню options for Target `STM32` вкладка Debug:
точка у Use Simulator
пустой квадрат у Limit Speed to Real-Time
галка у Load Application at Startup
галка у Run to main()
Initialization File - пустая строка
Restore Debug Session Setting - во всех квадратах галки
CPU DILL: SARMCM3.DLL
Pframetr: -REMAP
Dialog DLL: DCM.DLL
Parametr:-pCM3
Что не так?
Вроде бы все верно. Скинь проект, попробую разобраться )
Схема подключения , похожа на http://parshev.files.wordpress.com/2011/11/button_bb1.png?w=500&h=416
Вот мой код
//
#include
#include "stm32f30x_gpio.c"
//
void initAll()
{
GPIO_InitTypeDef port;
//
RCC_AHBPeriphResetCmd(RCC_AHBPeriph_GPIOA, ENABLE);
//
GPIO_StructInit(&port);
//
port.GPIO_Mode=GPIO_Mode_IN;
port.GPIO_PuPd=GPIO_PuPd_DOWN;
port.GPIO_Pin=GPIO_Pin_3;
port.GPIO_Speed=GPIO_Speed_2MHz;
GPIO_Init(GPIOA,&port);
//
port.GPIO_Mode=GPIO_Mode_OUT;
port.GPIO_OType=GPIO_OType_PP;
port.GPIO_PuPd=GPIO_PuPd_NOPULL;
port.GPIO_Pin=GPIO_Pin_2;
port.GPIO_Speed=GPIO_Speed_2MHz;
GPIO_Init(GPIOA,&port);
}
int main()
{
uint8_t buttonState = 0;
initAll();
while(1)
{
buttonState=GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_3);
if (buttonState == 1 )
{
GPIO_SetBits(GPIOA,GPIO_Pin_2);
}
else
{
GPIO_ResetBits(GPIOA,GPIO_Pin_2);
}
}
}
Почему-то у меня моргают и диоды на плате...не понятно. Помогите разобраться
А какие именно диоды и на какой плате?
Плата STM32F3Discovery. Диод(обычный красный) подключен одной ногой на GND платы, второй через резистор на PA3. Кнопка к PA2 и на +3В c платы - и ничего не светиться.
Подключаю кнопку к +5В и диод светиться но в месте с ним еще светятся голубые диоды на плате(бледно, но светятся). В чем может быть дело?
Делал то же самое но из примеров от STM с EXTI там все работает на +3В.
В коде вроде наоборот - кнопка на А3, диод на А2
А, и кстати тактирование не той командой включается
Да да РА3 кнопка, ошибся. Где прочитать про то как тестировать. И из-за этого у меня не работает?
не работает из-за тактирования. Надо RCC_AHBPeriphClockCmd() команду использовать для включения тактирования
Спасибо, невнимательно читал(
Хочу попробовать сделать все уроки по ардуино но на стм32.
Здравствуйте. При подключении "GPIO_STM32F4xx.h" и "stm32f4xx_gpio.h" проект не компилится.
Там одинаковые переменные. Как быть?
C:\Keil_v5\ARM\PACK\Keil\STM32F4xx_DFP\1.0.8\RTE_Driver\GPIO_STM32F4xx.h(57): error: #40: expected an identifier GPIO_AF_TIM1 = 1,
Вот такого вида ошибки.
В 5 Кейле вообще несколько по другому наверно надо создавать проект, вроде бы там библиотеки автоматически добавляются. Хотя я им не пользовался, сыроват на мой взгляд.
Я было взялся за 5 версию, но, похоже, придётся поставить 4. Слишком уж много граблей:)
=)
Подскажите пожалуйста, пытаюсь сделать это задание. Сижу и пытаюсь понять где накосячил. Смысл какой - у меня процессор не 103 а 407 и пытаясь адаптировать под него эту мигалку, при компиляции получаю ошибку "MainCode\main.c(11): error: #20: identifier "GPIO_Mode_IPD" is undefined". Залез в "stm32f4xx_gpio.h", а там вообще не так много перечислений режимов работы. И тут возник вопрос - а может у меня процессор так не умеет или надо как-то по другому это делать. Среда разработки Keil 4.73, процессор выбран верно, SPL качал с сайта производителя(еле нашёл где это вообще скачивается).
Для F4 просто по-другому режимы называются, бери из stm32f4xx_gpio.h подходящий
если настроить вывод как "Output push-pull", куда будет подтяжка к "+" или к "-" ?
Push-pull- двухтактный выход, если подали "1", то подключен к питанию, если "0", то к земле.
Да, то что двухтактный я понимаю, извиняюсь я неполноценно задал вопрос:
допустим
gpio.GPIO_Mode = GPIO_Mode_Out_PP; //Выход Push-Pull
и дальше пошли настраивать остальную периферию.
Как будет вести себя вывод в это время ?
ведь в регистр мы еще не записали
ни GPIOC->BSRR=GPIO_BSRR_BS9; // "1"
ни GPIOC->BSRR=GPIO_BSRR_BR9; // "0"
Скорее всего по умолчанию вывод будет в нулевом состоянии.
Здравствуйте.
У меня такой вопрос:
У меня есть 8 бит данных.
У регистра ODR свободны первые 16 разрядов.
Могу ли я записать 8 бит данных в регистр ODR в ячейки с 8-ой по 15-ую, и как это сделать, не используя побитовую запись через BSRR?
Например, если записывать так:
uint8_t word = 3;
GPIOA->ODR = word;
То запись будет произведена в первые 8 разрядов ODR. А мне нужны с 8-го по 15-ый.
Так можно к примеру:
GPIOA->ODR = (word << 8);
Здравствуйте!
При компиляции программы, возникают следующие ошибки.
Контроллер в проекте выбрал такой же как у Вас.
Почему может возникать эта ошибка? Пути к файлам указаны верно. Тестовая программа компилировалась.
В этой же как будто не виден файл "stm32f10x_gpio.c", но *.h файл подключен.
test.axf: Error: L6218E: Undefined symbol GPIO_Init (referred from test.o).
test.axf: Error: L6218E: Undefined symbol GPIO_ReadInputDataBit (referred from test.o).
test.axf: Error: L6218E: Undefined symbol GPIO_ResetBits (referred from test.o).
test.axf: Error: L6218E: Undefined symbol GPIO_SetBits (referred from test.o).
test.axf: Error: L6218E: Undefined symbol GPIO_StructInit (referred from test.o).
Target not created
Эх, удалить уже нельзя, нашел свой косяк. Подключить то - подключил, а в проект добавить забыл.
Здравствуйте. Вы пишите в уроке
"//Отметим только что один из параметров – указатель(!) на
//нашу структуру
GPIO_Init(GPIOA, &port);"
Но разве "&" это указатель, а не адрес?
Да, & - это операция взятия адреса. А переменная, в которой хранится адрес на другую переменную является указателем ) Просто здесь мы не создавали отдельную переменную-указатель для хранения адреса, а передали его сразу в функцию через &.
А, я понял, спасибо за ответ)
Не за что)
Доброго времени суток!
Вопрос у меня такой, надеюсь поймете меня. может не совсем в тему. Вобщем у меня кнопка(физическая в приборе привязана к ножке микроконтроллера. когда я на нее нажимаю, прибор должен включиться. Т.е я должен опрашивать ножку контроллера, не нажата ли кнопка. если кнопка нажата, то я должен подать логическую единицу на другую ногу мк и зафиксировать что прибор сейчас включен. т.к при повторном нажатии на кнопку я его должен отключить. можете подсказать? как это реализовать программно.
Один из вариантов - использовать внешнее прерывание на той ножке, где находится кнопка и в обработчике менять состояние другой ножки.
Добрый день! Не могу найти таблицу №18 в документации
Вот тут она под номером 20 - http://www.st.com/content/ccc/resource/technical/document/reference_manual/59/b9/ba/7f/11/af/43/d5/CD00171190.pdf/files/CD00171190.pdf/jcr:content/translations/en.CD00171190.pdf
Добрый день.
Спасибо за уроки, у меня stm32f103c8 как изменить Ваш код , что-бы зажечь светодиод на РС13 (установленный на плате)?
/****************************gpio.c*********************************/
//Подключаем все нужные файлы
#include "stm32f10x.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_gpio.h"
/*******************************************************************/
//Тут будет вся инициализация всей использующейся периферии
void initAll()
{
//Объявляем переменную port типа GPIO_InitTypeDef
GPIO_InitTypeDef port;
//Это функция из файла stm32f10x_rcc.c, включает тактирование на GPIOA
//GPIOA сидит на шине APB2
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
//А про эту функцию мы уже говорили
//Отметим только что один из параметров – указатель(!) на
//нашу структуру
GPIO_Init(GPIOC, &port);
//Настраиваем вывод, на котором будет висеть диодик – PA0
port.GPIO_Mode = GPIO_Mode_Out_PP;
port.GPIO_Pin = GPIO_Pin_13;
port.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(GPIOC, &port);
}
/*******************************************************************/
int main()
{
//Объявляем переменную для хранения состояния кнопки
initAll();
while(1)
{
GPIO_SetBits(GPIOC, GPIO_Pin_13);
//GPIO_ResetBits(GPIOC, GPIO_Pin_13);//
}
}
/****************************End of file****************************/
Вроде бы все верно в коде, кроме одного момента в инициализации:
GPIO_Init(GPIOC, &port);
//Настраиваем вывод, на котором будет висеть диодик – PA0
port.GPIO_Mode = GPIO_Mode_Out_PP;
port.GPIO_Pin = GPIO_Pin_13;
port.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(GPIOC, &port);
Здесь первым делом вызывается функция иницилазации - до(!) того, как поля структуры port были заполнены нужными данными.